
基于细分驱动的船用仪表步进电机控制的实现
在本设计中励磁绕组采用阶梯型电压驱动,在绕组上进行电流叠加,即每经过一个细分信号周期,单片机输出到电机线圈的电压顺次发生变化,使得通过线圈的电流按上述公式产生接近正弦波的变化,逐渐增大或减少,而不是一次性地通入或切断,使电机能更平稳地运行。
组合电阻式细分驱动是指步进电机每一相线圈一端与单片机的I/O口相连,另一端与N个阻值不同、处于并联方式的电阻相连,N个电阻的数量和取值大小需要考虑电机内部线圈电阻,以便产生能够驱动电机的、接近于正弦波的阶梯波形。单片机与步进电机之间无专用驱动芯片。图2所示为该24细分驱动法的硬件电路图。
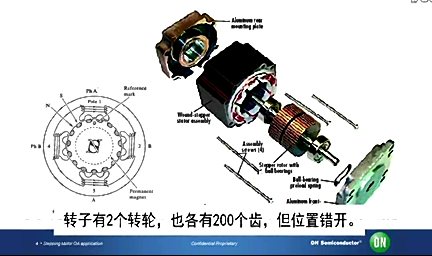
图中M1、M2为步进电机的一相绕组,M3、M4为另一相绕组,SN74HC595是串行输入并行输出芯片,用作扩展PIC单片机的I/O口,每一相绕组上都接有3个并联的电阻。因为VID29-05输出轴的步距角最小可以达到(1/12)°,而它内置减速比为180/1的齿轮系,因此一个微步表示指针转子转动15°。VID29-05步进电机一个周期共有6个分步,即每个分步相位相差60°,每个分步可以细分为4个微步,整个周期细分为24个微步,即24细分,其对称的阶梯波形图如图3所示。
因为有12个不同的对称阶梯数值,故选取3个不同阻值的电阻与步进电机绕组线圈电阻一起就能得到16种逻辑组合,选取其中最合适的12种即可。在硬件电路中每一相都有3个电阻相并联,VID29-05步进电机的每相内部绕组电阻为210 ?赘,单片机I/O口输出电压为5 V,再根据VID29-05步进电机微步驱动的各相电流值,可以计算出3个电阻与电机内部绕组在电路中的总等效电阻值和步进电机一相绕组上的电压值,根据这些数据就可选配3个电阻的阻值和控制电阻引脚的电平逻辑。当QD输出高电平时,QA、QB、QC有8种组合可选,除去输出全高状态,可根据需要取出其中最适合的6种状态。当QD输出低电平时,同理可取出除去全低状态外的最适合的6种状态,由此可得到12个值。
3 步进电机组合电阻式细分驱动的软件设计
3.1 指示参数位置与步进电机微步数的关系
在本设计中,要显示的参数有温度、压力、转速和电压。温度显示范围为40 ℃~120 ℃,压力显示范围为0~1 MPa,转速显示范围为0~3 000 r/min,电压显示范围为18 V~32 V。在此对温度显示与步进电机微步数的计算关系进行说明,其余三表类似。根据厂家给定的温度面板满量程刻度为112.5°,步进电机细分驱动中每一步旋转角度(1/12)°,因此当达到满量程时步进电机的微步数为step=112.5×12=1 350 步。但温度是从40 ℃开始显示的,应将40 ℃作为指示零点,且满量程为120 ℃,满量程点与初始点相差温度为80 ℃,而它们之间的物理角度差为112.5°,因此温度每相差一度,指针应走过的物理角度为(112.5/80)°,温度与电压近似成线性关系,如图4所示的温度-电压关系图,由此可得关系式:
根据式(2)和式(3)就可计算出相对应的目标温度值y,再根据式(4)就可计算出目标温度相对应的仪表指针位置,即指针距初始点(“40 ℃”点)的微步数。将此位置与指针的当前位置进行比较,即可得到指针应转动的方向和转角。
















评论