
基于51单片机的智能气动泵控制系统的设计

气体流量控制
在气体流量测量的基础上,给定值和实际测得的瞬时流量进行比较后算出偏差,然后对气体流量进行调节。由于气体流量系统的精确数学模型很难获得,而模糊控制算法具有人的智能思维、适应性好、鲁棒性强等特点,正适用于这类系统。因此,采用模糊控制算法对气体流量进行自动控制,可取得良好的控制特性,其模糊控制器框图如图5所示。

模糊控制器采用双输入、单输出的二维结构。输入变量为瞬时流量偏差e和偏差变化c,输出变量为控制量u。其模糊子集分别为
E={NL, NM, NS, NO, PO, PS, PM, PL}
C={NL, NM, NS, O, PS, PM, PL}
U={NL, NM, NS, O, PS, PM, PL}
它们的论域分别为
E={-6,-5,-4,-3,-2,-1,-0, +0, 1, 2, 3, 4, 5, 6}
C={-6,-5,-4,-3,-2,-1, 0, 1, 2, 3, 4, 5, 6}
U={-7,-6,-5,-4,-3,-2,-1, 0, 1, 2, 3, 4, 5, 6, 7}
当瞬时流量变化时,通过驱动调节阀,控制其开启的大小及变化规律,使偏差趋近于零。根据气体流量的参数特点和现场实际操作经验及专家的知识理论,总结出模糊控制规则表,如表1所示。

选择模糊控制规则是模糊控制器的关键问题。为了更好地提高控制精度,本系统采用带有4个调整因子的控制规则:
其中,0α1α2α3α41,本系统选择:α1=0.26,α2=0.58,α3=0.76,α4=0.86。代入上式运算后经反复修改和实际调试,得到了实用的模糊控制查询表,如表2所示。

系统的软件设计及抗干扰措施
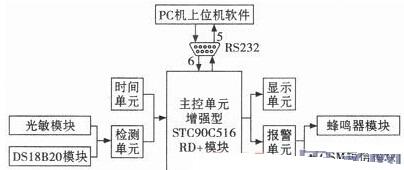
软件的设计包括系统下位机和上位机的设计。












评论