
基于DSP与FPGA的跟踪伺服运动控制器设计
2.4 其他模块
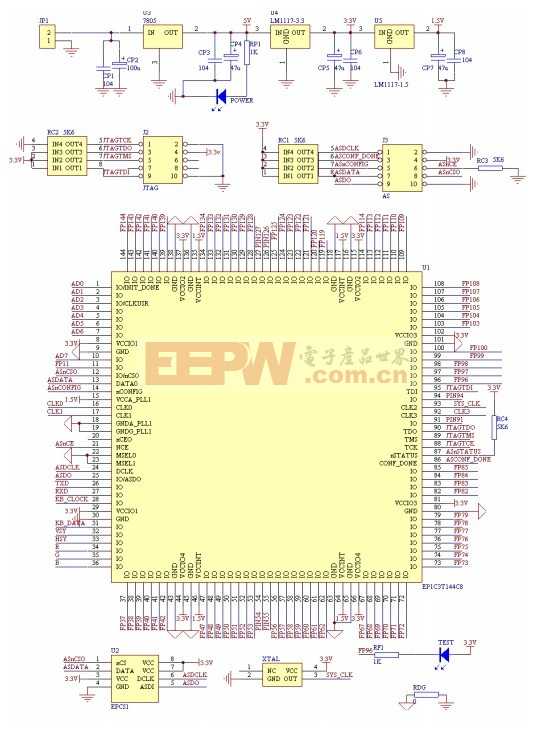
其他模块主要包括电源模块和通信接口模块。由于该控制器采用单+5 V供电,因此在内部需要进行电压转换,主要包括3.3 V、1.9 V和1.2 V以及-5 V和±12 V。其中3.3 V、1.9 V和1.2 V采用的是一般的LDO电压转换芯片,而-5 V和±12 V则采用开关电源MC34063。由于DSP要求3.3 V上电在1.9 V之前,在这里选用通过3.3 V转1.9 V的方法,既保证了上电顺序,又能提高电源的转换效率。
通信接口模块包括1路CAN总线,1路RS232和2路RS422。设计时主要保证与系统的其他部分匹配,一般都采用通常的工业标准。
3 软件流程
为了提高控制的精度和响应速度,在硬件电路基础上增加位置环和速度环。其中位置和位置增量数据通过RS422从外部编码器传入,速度值数据通过由QEP电路产生。此外丰富的模拟信号输入通道还可以增加电流环和其他反馈量,进一步提高系统的响应速度和稳定性。基本软件流程图如图4所示。

系统上电后自动初始化各端口和相关变量,并等待接收上位机开始指令,接收到开始指令后进入准备状态。因为整个跟踪系统需要同步工作才能产生有效的数据,所以需要等待外部同步脉冲信号,在这里以外部中断的形式接收。然后逐步完成控制算法。当收到结束指令时完成所有工作。
本文给出了一种基于DSP和FPGA的光电跟踪系统伺服控制器的硬件结构和软件流程。实验证明,这种结构紧凑灵活,控制算法完全由控制器完成,使用CAN总线方式传输上位机指令,安全可靠,使计算机完全从工作现场解脱出来。

pid控制器相关文章:pid控制器原理










评论