
基于FPGA的磁浮轴承控制系统的设计与研究
由于有电磁力F∝i(t)2/x(t)2,其中i(t)为激磁电流,x(t)为对应气隙,因此,要使转子稳定悬浮在平衡位置,必须满足f=F-mg=0。假设输入初始电流为i0,转子与电磁铁间的气隙为x0,如将转子作为单质点总集中质量来处理,那么,当转子质心在Y方向上有向上的偏移量X时(转子仅存在平移,无干扰力存在),其转子的中心运动方程可表示为:

事实上,轴向磁铁和径向磁铁具有相同的线性化数学模型,只是电流刚度和位移刚度不同,因此,轴向和径向可采用相同的控制方法。
在



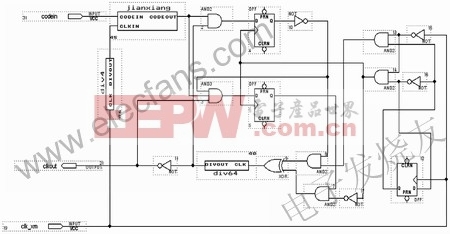
在本系统的仿真中,其数字PID使用xilinx提供的模块集(blockset)构建而成,如图6所示。

上述仿真中,偏磁电流i0为3.3 A(为仿真方便,取3.3 A并扩大1 000倍),平衡气隙x0为1mm,磁极的截面积S为10 500 mm2,电磁线圈匝数为150匝,真空磁导率μ0为4π×10-7 Vs/Am,另外,取:mg=733 N,1/m=0.013(为仿真方便,扩大1000倍),kp=8 800,ki=18.5,kd=1 000 000,kp1=9 000,ki1=220 000,kd1=50,T=2×10-5。

pid控制器相关文章:pid控制器原理








评论