
基于SABER软件的数字控制电源系统的仿真设计

本仿真实例的主电路采用同步整流有源箝位正激变换器,控制方法为电压单环控制。系统结构见图4所示。Vin为输入直流电压,S1和S2分别为正激变换器的主管和箝位管,Cc为箝位电容,Tr为变压器,SR1和SR2为变换器副边的同步管,Lf和Cf组成输出滤波环节,Ro为电阻负载。当S1和SR1导通时,能量从原边传递到副边,经过整流、滤波后得到直流输出电压;当S2和SR2导通时,变压器通过箝位电容实现磁复位,副边经过SR2续流。数字处理器对输出电压进行采样,根据内部提供的电压基准进行电压环调节,电压环的输出改变PWM驱动信号的占空比,从而改变四个开关管的导通时间,最终使输出电压稳定。
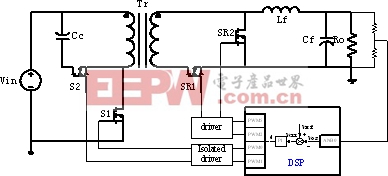
图4 系统结构图
下面是采用Saber软件实现的建模仿真过程。主要参数如下:输入为48VDC,输出为3.3V/20A,开关频率为300KHz,DSP的采样频率为50KHz,所选用DSP芯片的工作频率为32MHz。
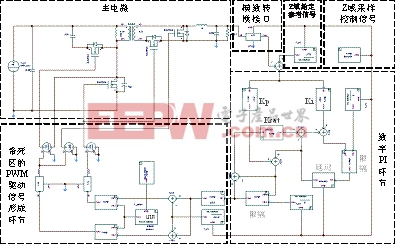
主电路部分采用仿真库中的模拟元器件构成。输入为48V直流电压源,主管S1和箝位管S2及副边两同步管均为理想的N沟道MOSFET,箝位电容Cc为2.2uF,变压器匝比为4:1,滤波电感为1uH,滤波电容为300uF。控制部分的离散化仿真模型可以根据图2和图3所给出的框图得到。首先,AD采样环节由一个模数转换接口“a2z”实现。电压基准为一个Z域给定信号。以上两者的差值为误差项。然后分别由Z域的增益、加法器、比较器(用于积分限幅)和延迟等元件按照图3中的连接方法构成整个PI计算环节。最后,将PI计算的输出分别增加和减少一个微小量后与一个频率为300KHz的三角波相交截,产生带有死区的PWM互补输出,经过数模转换接口“z2a”后变成电压值,再通过压控电压源实现两路信号的放大和电气隔离,而后分别作为主电路中变压器原边主管与箝位管以及副边两同步管的驱动信号。电源系统的整体仿真电路图见图5所示。仿真电路中除增益之外的大多数Z域元件都需要一个Z域采样脉冲信号进行控制,本例中采样频率设为50KHz。另外,三角波发生器由一个Z域脉冲源实现,它的控制信号频率应为DSP芯片的工作频率32MHz,输出的三角波频率为300KHz。







评论