我们具有自主知识产权的车载全景视觉技术是将分布安装于车辆周边的图像传感器捕捉的图像进行合成和投影,在人机界面虚拟一个单一的全景图像,并且这个图像时无盲区的,能够360°的观察车身周边的状况。同时,这个图像经过合成和投影,形成符合人的思维习惯的全景图像。
关键字:全景视觉传感器 汽车环视系统 计算机视觉 FPGA 图像处理
随着计算机视觉技术的提升,安防领域开始逐步发生变化。
关键字:计算机视觉 监控
近日,Facebook 通过其子公司 Oculus 在瑞士布局,收购了 Zurich Eye,一个计算机视觉公司。 据德国媒体 Handelszeitung 报道,此次收购,Facebook 瑞士同样会得到的财政支持,其股本已从 12 万瑞士法郎(约 80 万人民币)增加至 202 万瑞士法郎(约1384万人民币)。据悉他们将会把资金集中在研发领域。 之后,Facebook 发言人向 Swiss Info 确认这个 10 人小团队将会进驻设置在苏黎世的新办公室,但是,Oculus 拒绝对本
关键字:Facebook 计算机视觉
摘要:在对烟叶品质进行图像处理过程中,借助MATLAB图像处理工具箱和神经网络技术,对各种类型的烟叶的数字图像进行计算机视觉分析,包括边缘检测、轮廓提取、用图像工具箱抽取烟叶数字图像特征,将待测烟叶样本与标
关键字:计算机视觉 方法 神经网络 智能识别
随着硬件、算法及大数据的不断发展,整个人工智能领域面临前所未有的规模增长,今年有望更上一层楼。
关键字:计算机视觉 人工智能
新的计算机视觉时代降临,促使增强现实和全息成像等先进技术从台式电脑环境步入移动和嵌入式平台,同时也使得包括CPU和GPU在内的现有硬件面临性能极限的考验。 随着开发人员在智能手机、平板电脑、可穿戴产品、监控装置和联网汽车中不断增加新的多媒体功能, 在当下的设计中,CPU和GPU是处理密集型图像算法的主要承载平台。然而,在实现一些诸如双摄相头、低光照拍摄和快速自动对焦等创新功能时, OEM厂商和开发人员也不得不作出一些妥协。 这种趋势挑战了,甚至超越了并非设计用于处理密集型图像算法的CPU和
关键字:CEVA-XM4 计算机视觉
电子产品世界,为电子工程师提供全面的电子产品信息和行业解决方案,是电子工程师的技术中心和交流中心,是电子产品的市场中心,EEPW 20年的品牌历史,是电子工程师的网络家园
关键字:人脸检测 openCV 计算机视觉
摘要 :开发了一种虚拟场景与实时视频之间的合成技术,成功地将该技术应用于虚拟规 划系统中,详细介绍了系统所采用的基于计算机视觉的标识识别和实时、自动摄像机位置、姿态跟踪算法,并给出了系统运行结果。0
关键字:计算机视觉 合成 方法研究
摘要:在对烟叶品质进行图像处理过程中,借助MATLAB图像处理工具箱和神经网络技术,对各种类型的烟叶的数字图像进行计算机视觉分析,包括边缘检测、轮廓提取、用图像工具箱抽取烟叶数字图像特征,将待测烟叶样本与标
关键字:计算机视觉 方法 神经网络 智能识别
基于计算机视觉的四轮定位方法充分利用了视觉理论,巧妙地运用了空间几何知识,实现了车轮定位参数的精确、快速、方便检测。本文针对基于透视学方式的原理和基于空间向量方式的原理进行了探讨与分析,给出了本文提出的基于空间向量方式的数学模型,实测实验证明了其正确性和有效性。为国内汽车电子检测行业提供了新思路和新技术。
关键字:计算机视觉 技术研究 汽车 四轮定位
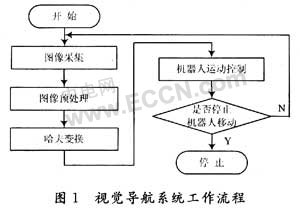
现代机器人技术在人工智能、计算机技术和传感器技术的推动下获得了飞速发展,其中移动机器人因具有可移动性和自治能力,能适应环境变化被广泛用于物流、探测、服务等领域。移动机器人的核心技术之一是导航技术,特别是自主导航技术。由于环境的动态变化和不可预测性、机器人感知手段的不完备等原因,使得移动机器人的导航难度较大,一直是人们研究的重点。 目前常用的一种导航方式是“跟随路径导引”,即机器人通过对能感知到某些外部的连续路径参考信息做出相应的反应来导航。如在机器人运动路径上敷设金属导线
关键字:计算机视觉
也许有一天当我们戴上特殊的3D眼镜在圆明园漫步时,就可以欣赏到当年圆明园皇家园林的宏伟风貌。这并不是电影场景,而是“增强现实技术”可以带给我们的奇妙体验。北京理工大学的王涌天教授领导的研究项目正在致力于通过增强现实技术完成对于圆明园的虚拟重建。 增强现实技术是计算机视觉、计算机图形学等技术中近年来的一个研究热点,它通过可以在真实场景中添加虚拟3D图形,带给用户真实的感受。目前增强现
关键字:视觉 感受 增强现实技术 计算机视觉 计算机图形学
2007年12月27~28日,由清华大学主办的第五届Tsinghua-KAIST计算机视觉与模式识别研讨会在清华召开。清华大学电子系丁晓青教授及韩国科学技术院KAIST计算机与电子工程系金镇衡(Jin Hyung KIM)教授共同担任会议主席。清华电子系主任王希勤教授、电子系图像所所长王生进教授在研讨会上致词。韩国KAIST计算机与电子工程系人工智能和模式识别实验室的十余名师生、中科院自动化所以及清华电子系部分师生参加研讨会。
关键字:Tsinghua-KAIST 计算机视觉 模式识别 清华 工业控制 工业控制
计算机视觉介绍
Computer vision is the emulation of biological vision using computers and machines. It deals with the problem of inferring three-dimensional (3D) information about the world and the objects [
查看详细 ]
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司
京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473