
基于DSP的运动相机控制系统设计
步进电机驱动器选择配套的ASD18A—K驱动器,ASD18A—K驱动器提供控制用电源、转速控制脉冲、运动方向控制脉冲、A相脉冲输出、B相脉冲输出、定时、警报、分辨率转换和电流切换等电气接口。ASD18A—K驱动器可以通过功能转换开关调节分辨率、脉冲输入方式、电流大小,转速大小等,合理选择参数可以抑制低速运行时的振动,使启动时的动作更为平稳。
DSP选择高性价比且性能优异的数字信号处理器TMS320LF2407,集成了A/D、PWM发生器、光电编码器、接口电路等片内外设。具有丰富的片上资源,544 BDARAM,2 KB SARAM,32 KB FLASH,2个事件管理器(每个均包含2个16位的通用定时器、8个PWM通道、3个捕获单元)用于产生驱动电机的PWM波形,16通道10位,转换时间为500 ns的ADC模块实现模拟控制量的A/D转换、丰富的外部存储器接口(192K×16 b:64 KB的程序存储器,64 KB的数据存储器、64 KB I/O实现DSP与键盘及液晶显示光电耦合器起隔离和电压转换的作用)、看门狗模块、CAN、SCI、多个GPIO、5个外部中断、PLL等。非常高的运算性能,最高可达40 MIPS,指令周期25 ns。具有丰富的开发资源,JTAG、CCS、完备的技术文档支持、144 pin LQFP封装。TMS320LF2407的1/O输出是3.3 V的CMOS电平,采用245缓冲器转换成TTL电平后驱动步进电机驱动器ASD18A—K,ASD18A—K完成细分、环形分配和功率驱动。
3 系统软件设计
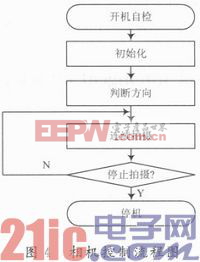
控制系统程序由主程序、子程序和中断子程序组成,主程序完成系统初始化及各变量的初始化,子程序完成各控制面板的扫描,中断子程序实现控制面板上各参数设定的功能。相机控制流程图如图4所示。本文引用地址://m.amcfsurvey.com/article/148098.htm
由于TMS320LF2407通过I/O口和驱动器连接,需要对接口初始化定义,IOPBO被配置为基本功能方式;PWM3 IOPB2,IOPB5被配置为通用I/O方式;IOPC5被配置为通用I/O方式;在步进电机驱动程序设计中,充分运用TMS320LF2407控制器的事件管理模块。在TMS320LF2407中各有一个16位比较寄存器CMPRx(x=4、5、6),每个比较寄存器各有两个比较PWM输出引脚,产生3路PWM输出信号,控制电机转速(位置),其输出引脚极性将由控制寄存器(ACTR)的控制位来决定,根据需要选择高电平或低电平作为开通信号。在PWM信号调制中需要周期一定的载波,这时用到了定时器3,它以内部CPU时钟作为输入,工作于连续增/减计数模式下,产生PWM脉冲输出,产生的脉冲为一个环形可变脉冲,这时由T3PR定时周期下溢和上溢时产生中断,刷新周期值,进行PWM调整。
4 结语
本文使用数字信号处理器TMS320LF2407通过驱动步进电机驱动器ASD18A—K,和嵌入式DSP控制程序来驱动ASM46AK—H100的谐波减速步进电机以实现对运动相机的控制,通过实验室模拟实验、现场实际操作和数据测试,该控制系统的设计达到了预期的要求。












评论