
实验20:步进电机2
实验目的
实验任务
本实验的任务设计一个步进电机运行控制电路,A、B、C、D分别表示步进电机的四相绕组,步进电机按四相四拍的方式运行。如要求电机正传时,控制端T=1,电机的四相绕组的通电顺序为AC—DA—BD—CB—AC……如要求电机反传时,控制端T=0,电机的四相绕组的通电顺序为AC—CB—BD—DA—AC……。
本文引用地址: //m.amcfsurvey.com/article/202310/451510.htm实验原理
为了实现上述设计要求,我们可以将T作为判断电机正转和反转的条件。
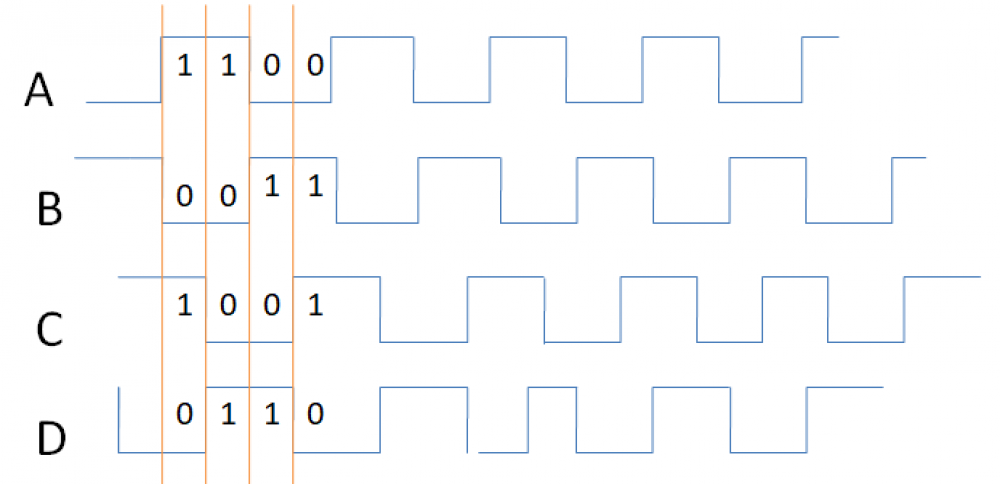
当T = 1时,电机的四相绕组的通电顺序为AC(1010)—DA(1001)—BD(0101)—CB(0110)—AC(1010)。
当T = 0时,电机的四相绕组的通电顺序为AC(1010)—CB(0110)—BD(0101)—DA(1001)—AC(1010)。由此我们可以认为四相的顺序为A-C-B-D
Verilog HDL建模描述
设计文件 stepmotor2.v
module stepmotor2(input wire clk,rst,input wire dir, //控制端 1:正转 0:反转output wire [3:0] led //四相控制对应的led,A(led[0]),B(led[1]),C(led[2]),D(led[3]));wire clk1h; //1秒时钟reg [3:0] ctrl; //DCBA四相控制 parameter S1 = 2'b00, //电机步进状态 AC S2 = 2'b01, //DA S3 = 2'b10, //BD S4 = 2'b11; //CB reg [1:0] cur_state,next_state; divide #( //产生1秒时钟信号.WIDTH(24),.N(12000000)) u1(.clk(clk),.rst_n(rst),.clkout(clk1h));always@(posedge clk1h or negedge rst) //第一段 if(!rst) cur_state <= S1; else cur_state <= next_state;always@(cur_state or rst or dir) //第二段,状态转移,dir控制方向 if(!rst) begin next_state = S1; end else begin if(dir) //当控制端为1,正转 case(cur_state) S1:next_state = S2; //正转S1-S2-S3-S4-S1 S2:next_state = S3; S3:next_state = S4; S4:next_state = S1; endcase else //当控制端为0,反转 case(cur_state) S1:next_state = S4; //反转S1-S4-S3-S2-S1 S2:next_state = S1; S3:next_state = S2; S4:next_state = S3; endcase endalways@(posedge clk1h or negedge rst) //第三段,当前状态输出 if(!rst) begin ctrl <= 4'b0101; end else begin case(next_state) S1: ctrl <= 4'b0101; //AC S2: ctrl <= 4'b1001; //DA S3: ctrl <= 4'b1010; //DB S4: ctrl <= 4'b0110; //CB default: ctrl <= 4'b0101; endcase endassign led = ctrl; //状态输出动作对应的ledendmodule
实验步骤
当拨码开关M7置1时,会按照ABCD按照10101001010101101010的顺序正向循环。
当拨码开关M7置0时,会按照ABCD按照10100110010110011010的顺序反向循环。
当任一时刻,rst所连接的按键开关置0,则回到1010状态,正向或反向则取决于此刻的M7值。










评论