
X射线检测仪控制系统的设计
2.1 共有模块
2.1.1 微控制器(MCU)
X射线检测仪控制系统各个单元在电路设计中都有一些共有模块,其中4个单元都采用Infineon 16位微控制器系列中的XC164CS作为每个单元的控制芯片。Infineon系列微控制器在汽车助力转向、发动机点火控制、车身控制以及汽车安全控制方面有广泛的应用,适应在恶劣环境下工作,是汽车电子领域的主流高档单片机品牌之一,并且现在也广泛应用于工业自动控制领域,所以选用这款微控制器能提高控制系统的稳定性和抗干扰能力。
2.1.2 IO隔离
每个控制单元的MCU与外围芯片之间都采用ADI公司iCoupler系列数字隔离器进行数字隔离。基于iCoupler工艺的数字隔离器在集成度、性能、功耗、易用性和可靠性方面都要优于光耦合器,高达到5 000 Vrms高压隔离性能,并且iCoupler器件是配套齐全的器件,除了常用的旁路电容以外无需外部元件,同时能以较高的数据速率(达100 Mbps)和较短的传播延迟(18 ns)比较快速地工作,它们还具有延长的工作寿命,不存在LED的耗坏问题。因此选用iCoupler系列数字隔离器作为IO数字隔离,能进一步提高控制系统的稳定性和抗干扰能力。
2.1.3 CAN总线
CAN总线是一种有效支持分布式控制或实时控制的串行通信网络。由于CAN总线具有通信速率高、开放性好、报文短、纠错能力强以及控制简单、扩展能力强、系统成本低等特点,越来越受到人们的关注,应用的领域也越来越广。所以选用CAN总线作为整个控制系统的总线。
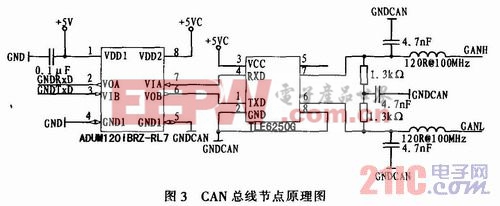
CAN节点一般采取CAN控制器或CAN接口芯片和总线驱动器构成,具体有3种构成形式:1)独立CAN通信控制器和驱动器构成;2)带控制功能的I/O器件和CAN驱动器构成;3)带在片CAN微控制器和CAN驱动器构成。本系统采用第3种形式,有利于简化电路设计,在冗余设计时便于程序控制,如图3所示。本文引用地址://m.amcfsurvey.com/article/162223.htm
CAN冗余有完全冗余和部份冗余两种。完全冗余就是双控制器冗余:双控制器+双驱动器+双总线。部分冗余有两种形式:1)双驱动器冗余:单控制器+模拟开关+双驱动器+双总线;2)双总线冗余:单控制器+单驱动器+模拟开关+双总线。而XC164CS采用了强大的增强的C166S V2内核架构并带有TwinCAN模块,其包含两个可以独立操作的CAN节点,完全能履行CAN2.0B规范,所以本系统采用部分冗余中的双驱动冗余,这样的冗余设计增强了控制系统稳定性。
2.2 运动控制单元
步进电机是一种将电脉冲转化为角位移的执行机构,可以通过控制脉冲个数来控制角位移量,从而达到精确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。X射线检测仪共有4个步进电机,采用日本东方电机AS66AC步进电机,分别控制载物台的二维移动、X射线管上下移动、以及像增强器和X射线CCD成像器的上下移动,它们是整个检测系统的运动完成单元,所以步进电机的驱动至关重要。

















评论