
基于CAN总线的联合收割机智能控制系统的设计与实现
摘要:本文介绍了一种以P87C2591单片机为主控器,以谷物流量传感器、谷物湿度传感器、割台高度传感器、地速传感器、升运器转速传感器、DGPS接收机、变量作业控制和智能控制终端为主要外围元件的联合收割机智能控制系统。此系统具有显示直观、准确,使用方便、可靠等优点,代表了联合收割机智能控制系统的最新发展趋势。在系统设计过程中充分考虑了性价比,选用价格低、性能稳定的元器件。通过运行调试,试验结果与设计要求基本一致。
关键词:CAN总线;联合收割机;智能控制
1 系统组成及工作原理
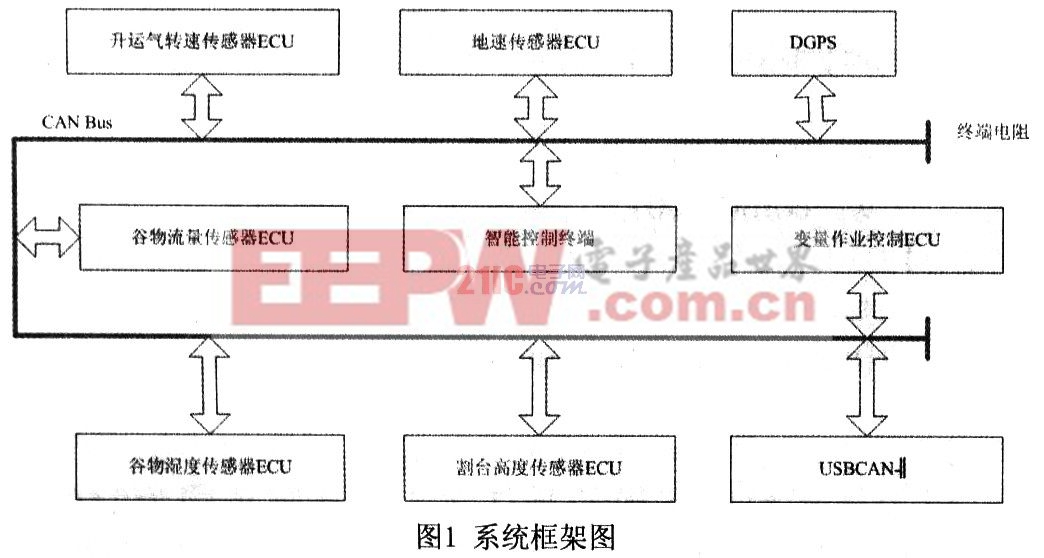
整个系统可以分成两个独立的部分:产量监测子系统和变量作业控制子系统。它们分别用来实现产量监测和变量作业控制的功能。系统框图如图1所示。系统中所有节点都是“即插即用”的,当其与总线连接或者断开时都可被控制终端检测到。当需要实现产量监测的时候,可以把变量作业控制ECU断开,只要在总线上连接实现测产的各传感器ECU、DPGS以及智能控制终端即可;当需要实现变量作业控制的功能时,可以断开系统中不需要用到的传感器ECU,连接上变量作业控制ECU以及地速传感器ECU即可。在两个子系统中,智能控制终端都必须连接在总线上,它监视着各节点的状态并且监控系统的运行,USBCAN-II是系统的一个附加节点,它是周立功发展有限公司生产的一种CAN-bus智能转换卡,通过USB电缆与PC连接,就可以在PC机上实时观察CAN总线上的所有报文,并进行CAN-bus网络数据分析和处理,有利于系统的调试和实验分析。
2 硬件构成
本系统硬件主要包括以下几个模块:集成有CAN控制器的增强型P87C591单片机主控模块、电源模块、传感器模块、人机交互接口模块、U盘文件读写模块等。其中P87C591微处理器负责接收和处理总线上各传感器采集到的数据和GPS数据,还负责发送控制命令等数据给总线上的其他节点;传感器完成信号的采样功能,微处理器通过U盘文件读写模块与U盘相连,用于存储产量和其他传感器,并且读取存储在U盘内的作物管理、变量作业处方图文件;通过RS232通用串行接口,微处理器和液晶显示器及触摸屏相连,实现人机交互的功能。
2.1 主控模块选型
系统采用Philips半导体公司生产的集成有CAN控制器的增强型P87C591,它是一个8位高性能微处理器,44引脚,除了具有51系列微处理器的通用功能和片内CAN控制器外,还集成有6路模拟输入的10位ADC,并可选择快速8位ADC,2个8位分辨率的脉宽调制输出(PWM),带字节方式主、从功能的I2C总线串行I/O口,以及片内看门狗定时器T3。此外,它还具有4个中断优先级,15个中断源。P87C59l微处理器采用了强大的80C5l指令集,并包括Philips半导体SJAl000独立CAN控制器的PeliCAN功能。
2.2 电源模块设计
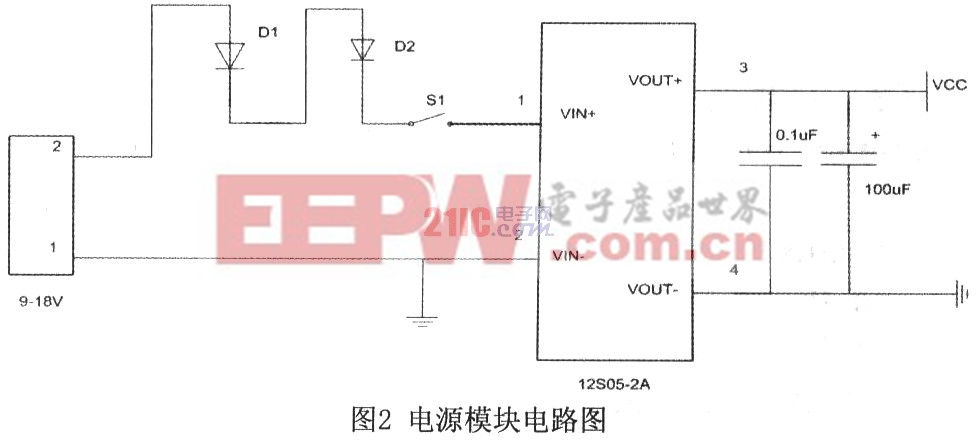
电源模块提供系统正常运行所必需的电源,其电路如图2所示。采用了12V转5V的DC-DC模块,输入端电源来自联合收割机的车载蓄电池,通过CAN总线电缆的电源线和地线接入控制终端,并能提供2A的负载电流。
















评论