
基于单片机AT89S52的电动车跷跷板设计
1.3.3 黑线检测方案设计
方案一:可见光发光二极管与光敏二极管组成的发射一接收电路。该方案缺点在于易受外界环境光源的干扰,容易造成误判,准确度不高。
方案二:脉冲调制的反射式红外发射-接收器。采用交流分量调制信号减少干扰,但需要控制占空比,要求有较大的电流,在本系统中不可取。
方案三:不调制的反射式红外发射-接收器。受外界干扰小,灵敏度高。
比较三种方案,方案三的准确度高,明显优于其他两种方案,所以选择方案三。
1.3.4 位置检测方案设计
方案一:从始端到末端用康铜丝水平置于木板一侧,通过采样检测电压值检测是否已经行驶到跷跷板末端B处,此方案要求与车相连,需要一定转换时间。
方案二:由鼠标工作原理采用光电码盘测量行驶距离是否已接近板长,或者将板长转换为接收到的计数脉冲个数,以此检测电动车是否行驶到末端。
比较两种方案,方案二简便可行,测量效果较好,所以选择方案二。
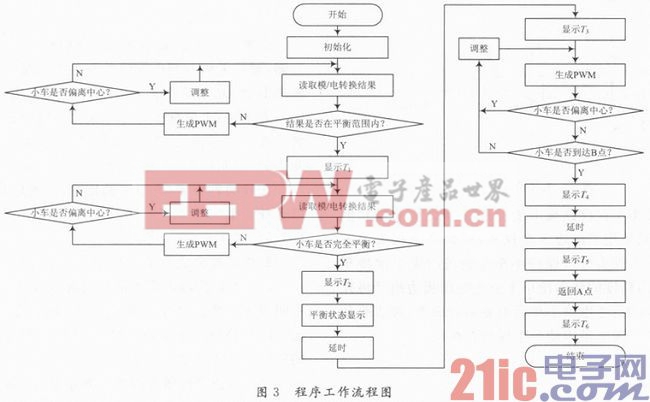
1.3.5 程序设计
程序需要完成以下的功能:
(1)不同阶段设定不同的行驶速度,小车在上坡和中间寻求平衡的时候必须要求不同的速度,已达到在规定时间使跷跷板平衡,利用软件检测和调节使小车在不同阶段具有不同的速度。
(2)综合多传感器以提高测量精度,确保小车在跷跷板上有比较稳定的状态。
(3)使用软件滤波器消除小车在行进时的抖动所造成的电压输出不稳定的问题。
程序流程如图3所示。本文引用地址://m.amcfsurvey.com/article/170567.htm
2 测试及误差分析
2.1 测试方法
测试工具:两块秒表(最小精度为0.1 s)、卷尺(最小精度为0.01 m)、数字万用表(MASTECH MY-65)。

将小车放在跷跷板A端,如图4所示,开启电源,记录以下各段时间并观察平衡指示(以下称测试条件1);将小车及配重分别放在规定范围内的任意位置,重复上述工作(以下称测试条件2)。其中T1表示小车从A点到中点C的时间;T2表示小车找平衡的时间;T3表示小车的平衡保持时间;T4表示小车从平衡点到跷跷板末端B的时间;T5表示小车在B点停留的时间(测试条件1),表示第二次增加配重保持平衡的时间(测试
条件2);T6表示小车从B点返回A点的时间;T7表示小车总行程的时间。
2.2 误差分析
(1)跷跷板所处位置可能不水平,给测量角度带来偏差,可以使用其他水平测试仪检测位置是否水平。
(2)由于电动车运动产生一定的振荡导致所测角度有一定偏差,可以将电动车座板牢固焊接在车体上或者将角度传感器安装在跷跷板上。
(3)跷跷板板面不够粗糙,摩擦力不够大,会使电动车产生一定的滑动,将板面用摩擦系数比较大的纸张贴在上面增大摩擦力。
3 结论
本文采用角度传感器直接测量系统角度的变化完成小车的平衡检测,PWM技术控制的步进电动机作为主驱动电机,使小车可以稳定准确地达到平衡及通过跷跷板。通过多次测试实验,系统达到了设计的要求,可以很好地完成任务。






评论