
高精度无刷直流电机伺服控制系统的设计与仿真
摘要:为提高伺服系统中无刷直流电机的控制效果,设计了以DSP为核心的无刷直流电机控制系统方案。本控制系统的主要优势在于利用数字信号处理器的高速实时运算处理功能,易于实现各种高效的控制算法,很好地解决了伺服系统中PWM信号的生成、电动机速度反馈和电流反馈等问题。并结合模糊控制算法进行了仿真研究,达到无刷直流电机的高精度伺服控制的目的。
关键词:无刷直流电机;DSP;PWM控制;Sinmulink仿真
在伺服传动系统中,无刷直流电动机(BLDCM)是一种新型的无级变速电动机,其结构简单可靠、维护方便、运行效率高及惯量小和控制精度高等优点,广泛应用于伺服控制精密数控机床、加工中心、机器人等领域。随着BLDCM应用领域的推广,对系统的动静态性能、鲁捧性、控制精度等要求越来越高。
本文以三相四极无刷直流电动机为研究对象,结合PID控制和模糊控制各自的优势,设计了一套基于TI公司的C2000系列TMS320F2812 DSP为核心的全数字永磁无刷直流电动机的闭环调速系统,以期满足BLDCM伺服控制系统的高精度、快速性、稳定性和鲁捧性的要求。
1 总体方案设计
系统没计采用三相四极无刷直流电动机PWM控制方案,逆变桥的通电方式采用两两导通方式该系统主要由三相四极无刷直流电动机、控制器、电子开关电路和化置检测器四部分组成。其结构框图如图1所示。

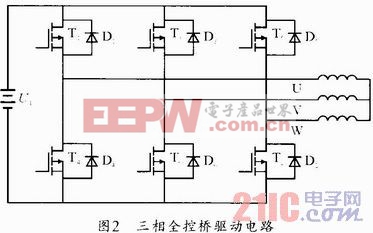
功率驱动方式采用三相Y型全桥驱动电路,如图2所示。本系统实现的关键就是通过位置环、速度环和电流环三闭环结构最终实现位置的伺服控制。从闭环结构上看,位置环在最外面,是本系统的主环,电流调节环和速度调节环在里面,两者都是为位置环而服务,电流调节器和速度调节器采用PI调节器,位置调节器采用PID调节器,以TMS320F2812微控制器为控制核心,以功率MOSFET管构成逆变器。通过改变逆变器开关器件的PWM占空比来改变电机电楸端电压,以实现电机转速的调节。
2 硬件设计
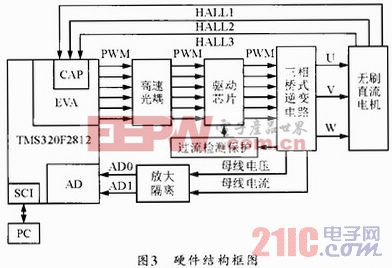
图3给出了基于TMS320F2812 DSP的无刷直流电机控制系统硬件结构框图。

霍尔传感器相关文章:霍尔传感器工作原理
伺服电机相关文章:伺服电机工作原理
pid控制器相关文章:pid控制器原理
霍尔传感器相关文章:霍尔传感器原理












评论