
基于LIN总线的纯电动车电池管理系统设计
2.2.3电池SOC 的估算和运行控制策略
在对SOC 进行估算时,一个准确和合适的模型是非常需要的,对于Kalman 滤波算法来说精确的SOC 的估算是建立在精确的电池模型的基础上。Thevenin 模型是目前来说比较准确的模型,该模型对电池的外特性的描述采用电池电动势、一个纯电阻和一个容阻回路串联的方法来实现,其电气模型的数学关系如下:
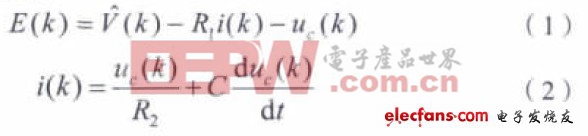
式(1)中k 为k 时刻,E(k)为电池端电压,V(k)是电池电动势,R1 是电池的欧姆内阻,R2 是电池的极化内阻,Uc 是电池的极化电压,电容R2C 回路是用于模拟电池极化过程中的动态特性。考虑到温度影响的情况下,电池的电动势与荷电状态有式(3)的关系:
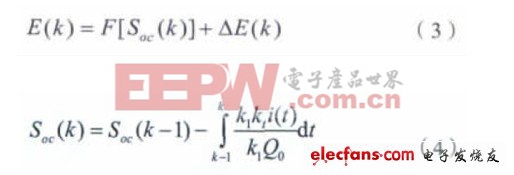
式中:F【Soc(k)】 是电池与电动势的函数关系, Soc(k)表示电池在不同温度下电动势相对于参考条件下的变化量。通过以上公式,在进行离散化后得到状态空间方程如下。
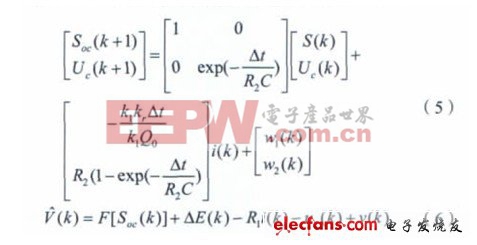
状态空间方程准确地给出了系统相关的系数矩阵A(K)、B(K)、C(K)、D(K)和常数矩阵W(K)、V(K),基于以上方程及相关矩阵,可以得到扩展Kalman 滤波估算算式。
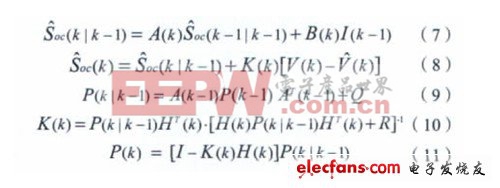
扩展Kalman 滤波算法由滤波器计算和滤波器增益计算两部分组成:滤波器计算由式(6)~(8)完成,在k 时刻,由式(7)利用(k-1)时刻的滤波结果得到SOC 的预测值,再根据状态空间方程(6)得到在k 时刻的状态变量预测值V(K),并与实际测量值比较后得到预测误差, 然后根据式(8)对状态变量的预测值修正,得到新的滤波结果。滤波器增益计算由式(9)~(11)完成,式中Q和R 分别是噪声W (k)和V (k)的方差阵。
3 实验结果分析
本设计的底层ECU 的电路板如图7 所示,每个单体电池上都会固定一块底层ECU 的电路板。

在不同的充电策略下来检验电池管理系统的工作情况,通过检测电池组中各个单体电池的充放电电压、电流、温度、SOC 等参数,与实际值相比较来说明系统的检测精度,如图8所示,其中数据每分钟记录一次,横坐标为时间min.
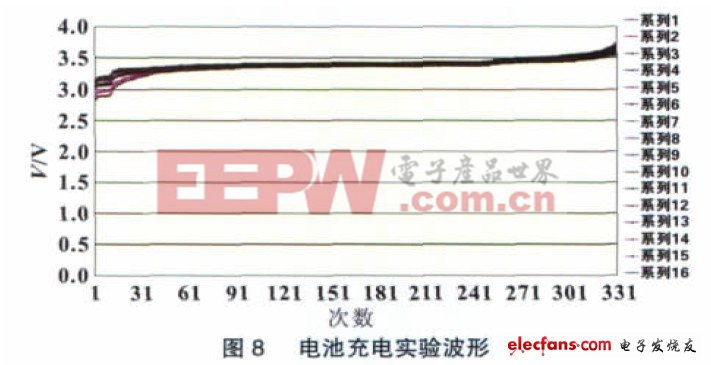
本设计设定充放电时电压上限为3.65 V,电压下限为2.95 V.温度报警为上限80 ℃。实验对电池进行充电,最终充电电压均在3.53~3.62 V,充电过程最大偏差50 mV,其中电池电压误差小于1%要求;此外,温度测量误差满足1%要求,电流测量精度为1%,SOC 误差在8%以内。当对单体电池实施人为过电压时,系统能及时进行报警和显示。通过实验表明本电池管理系统能达到预期的电池参数检测的目标,且都能满足精度要求。
4 结论
本文设计开发了一种磷酸铁锂电池管理系统,基于分布式方法检测各个单体电池的参数,引入了LIN总线技术,进一步降低了系统的成本。本系统实现了电池实时监测与保护、SOC 估算、LIN总线通信等功能。该系统结构简单、测量精度较高、能有效地保护电池组,用LIN总线代替常用的CAN 或RS232 通信,为设计新型电动汽车电池管理系统提供了重要依据。

霍尔传感器相关文章:霍尔传感器工作原理
霍尔传感器相关文章:霍尔传感器原理









评论