
微型测距雷达的原理及组成
2.2 三角波发生器
三角波发生器采用数字形成。D/A为12位,要产生200 Hz的调制频率,则振荡器约为0.819 2 MHz。考虑到一般晶体的频率为MHz量级,地址产生器为一个13位的计数器,选用74HC4040,计数器不用最低位,那么振荡器的频率为200 Hz×212×2=1.638 4 MHz,可以用TTL门电路作振荡器,这个设计用的是74HC04。
波形存储选用E2PROM芯片AT28C64,晶体选用1.683 4MHz。最重要的一点是必须测出微波头的非线性曲线,以便在非线性修正ROM中装入修正数据,简化起见,可以在波形存储ROM中烧制修正数据,无须再加专用的非线性修正电路。
2.3 窄带滤波器
模拟器件的发展与集成为小型化提供了充分的条件,像松下公司的MN6515,仅为8脚,其带通滤波器的中心频率f0可由外加的时钟频率fcp控制,其比值fcp/f0约为15.7。只要改变fcp的值,带通滤波器的中心频率就会在O~32 kHz范围内移动,非常方便,可采用图2方式进行控制。

另外还有一种窄带滤波器MAXIM的MAX262,由编码输入控制f0和Q的值,共有64阶滤波器,128级Q值控制。同时也可以控制振荡频率,由多片MAX262组成,使窄带滤波器的阶数达到几百甚至上千。控制Q值的不同,在频率的低端到高端,可以将窄带滤波器的3 dB带宽设计成相同或相近的宽度。
2.4 放大与AGC放大电路
前级放大电路可采用各公司的低噪声运放,AGC电路选用AD公司的AD603,或BB公司的VGA610,放大整形可选用TI公司或其他公司新出的R~R输出的运放。
2.5 单片机
单片机选用Atmel公司的AT89C51,也可选用其他公司的单片机,如PIC或AVR系列。这些单片机都是低成本且为人们所常用。
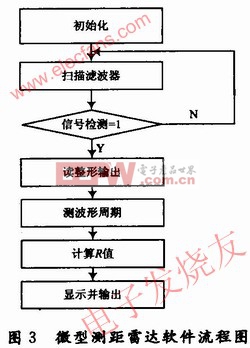
3 软件组成
软件用汇编语言编写,流程图如图3所示。
4 结语
低成本微型测距雷达经实验在原理上是行得通的,但距离较近,实际测试后发现微波头采用直接混频方式输出灵敏度较低。下一步改进需要增加一个中频,放大后解调,再进行视频放大。
对于要求测距更远的雷达,可通过增加发射功率,增大天线面积的方法。当功率较大时,考虑到连续波雷达泄露的影响,需要将发射天线与接收天线分开。对于更近距离的测量,例如小于2~3 m,可采用超声波测量。微型测距雷达的用途非常广阔,今后必将大量用于民用的许多领域。






评论