
基于滑模控制的三电平PWM整流器建模及仿真
1引言
本文引用地址://m.amcfsurvey.com/article/201540.htm随着电力电子装置的广泛应用,大量低功率因数的二极管不控整流和晶闸管相控整流设备,仅能实现能量的单向输送,对电网的谐波污染严重。可逆PWM整流器不仅具有能量可双向传输、网侧电流正弦及达到单位功率因数等特点,还解决了传统整流装置中存在的诸多问题,近年来越来越受到关注,具有广阔的应用前景[1]。在中高压大功率的应用场合,三电平PWM整流器应用较为广泛,它的功率因数达到1,相对于两电平PWM整流器,有以下优点:(1)每一个主功率开关管上承受的电压峰值只有两电平PWM整流器的1/2;(2)三电平PWM整流器有27个工作状态,使得输入侧电流波形在开关频率较低时也能保持一定的正弦度;(3)在相同开关频率及控制条件下,三电平PWM整流器输人电流的谐波远远小于两电平整流器,它更适合于高压大功率的场合。目前三电平PWM整流器通常采用同步旋转d-q坐标系下双闭环PI控制算法,但由于PWM整流器是一个非线性、时变不确定系统[2][3],故采用常规PI控制很难达到理想的控制效果,动态性能较差。
滑模变结构控制(SMC)是一种非连续性控制,其控制特性可以迫使系统在一定条件下,沿规定的状态轨迹作小幅度、高频率的上下运动,即“滑模”运动。由于具有快速响应、对参数变化不灵敏、抗干扰能力强,实现简单等本质上的优点,SMC在非线性系统中得到了越来越多的应用[4][5]。
本文基于三电平PWM整流器的双闭环控制系统,为了提高系统鲁棒性和输出电压动态响应,采用滑模控制器设计了电压外环,与常规PI控制器的电流内环组成了双闭环控制系统。仿真结果表明:在大功率且负载大范围变化的情况下,较常规PI控制器,采用滑模控制器的三电平PWM整流器直流母线电压波动明显减小,直流环节的动态响应得到有效提高,为进一步减小直流母线电容提供了可能。
2整流器的数学模型
二极管箝位三电平PWM整流器拓扑如图1所示,Ls和Rs分别是交流侧电抗器等效电感和等效内阻,Cd1、Cd2是直流侧上下母线电容,RL是直流侧负载电阻;ea、eb、ec是电网相电压,ia、ib、ic是电网相电流,Vdc1、Vdc2分别是母线电容Cd1和Cd2的电压,IL是负载电流。假设电网电压(ea,eb,ec)为纯正弦、对称的三相电压。引入三电平整流桥三相桥臂的开关函数Sip、Sio、Sin(i=a、b、c),其意义为:
(1)S1i,S2i开通,S3i,S4i关断,则Sip=1,Sio=0,Sin=0;
(2)S2i,S3i开通,S1i,S4i关断,则Sip=0,Sio=1,Sin=0;
(3)S3i,S4i开通,S1i,S2i关断,则Sip=0,Sio=0,Sin=1。
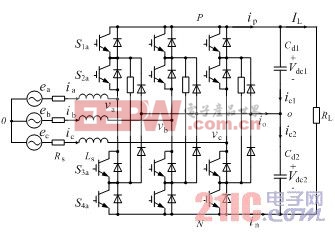
图1三电平PWM整流器主电路拓扑
省略公式推导,可得a-b-c坐标系下系统的数学模型为:
式中:
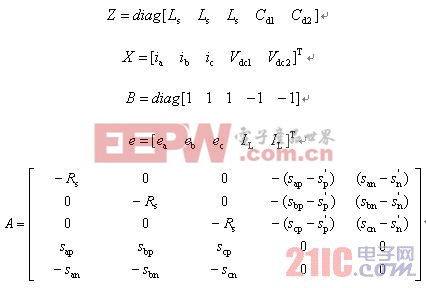
其中,
基于a-b-c坐标系下的数学模型物理意义明晰,但模型交流侧变量均为时变的交流量,不利于控制系统的设计。而在同步旋转d-q坐标系下,三相对称系统中各个交流量均可以等效为直流量。为此,引入坐标变换,得到d-q坐标系下的数学模型。
式中:

设vd和vq为旋转d-q坐标系下网侧电压的d轴和q轴分量,则有:

式中是微分算子。
忽略母线上下电容之间的误差,认为Cd1=Cd2=Cd,则有:
根据上述模型,得到d-q坐标系下三电平PWM整流器的等效电路如图2所示。对于直流侧,三电平整流桥相当于两个电流源,而对于交流侧,三电平整流桥则相当于两个电压源。
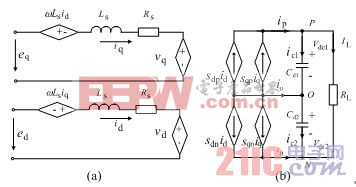
图2d-q坐标系下三电平整流器等效电路
3电压外环滑模控制器设计
三电平PWM整流器外部控制变量有两个:Vdc和iq,其中Vdc受控于sd,以维持直流母线电压的稳定;iq受控于sq,以控制系统无功电流(单位功率因数、超前、滞后)。把Vdc和iq作为可控输出,得出状态空间标准形为
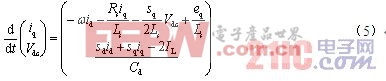
将参考值和实际变量之间的误差带入式(5)得

式中,eig=iqref–iq;eVdc=Vdcref–Vdc;eΦ=Φref–Φ;Φ是扰动量;
由式(6)和已知的两个控制自由度选择如下滑模面可保证闭环系统的鲁棒性。

式中,是和直流电压一阶响应相关的参数。
由式(3)、(4)将变为

在d-q旋转坐标系中,,eq=0,在理想的滑模状态下由式(5)计算sq,并将结果简化得:
同理,在理想滑模面上,输出电压精确跟踪参考值,Vdc=Vdcref,并根据功率平衡可得到:
将式(10)和式(11)代入式(9),得:
则sd和sq与滑模面的选择没有很大联系,简化了滑模控制器的设计。滑模面为:
由式(12)和式(14)得出电压外环控制器控制方程
因此,采用如下控制策略实现三电平PWM整流器的滑模变结构控制:设定iqref,采用PI控制器对电流环进行控制;电压外环控制采用滑模变结构控制算法,以实际输出电压Vdc和给定电压Vdcref为控制器输入,控制器输出作为电流环PI调节器的参考电流idref,实现滑模变结构控制与电压定向矢量控制的有效结合。其控制结构框图如图3所示。
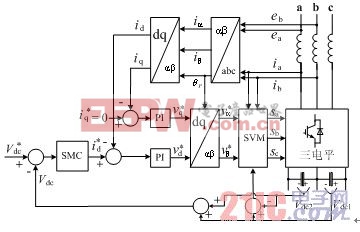
图3三电平整流器滑模控制原理框图
4仿真结果
依照前面所述数学模型和控制策略,对本文提出的控制方法的有效性进行了仿真研究。仿真参数如下:输入电感20mH,直流母线上下电容4000/2μF,输入相电压220V,直流母线电压600V,电网频率50Hz,开关频率2kHz,输出功率5kW,在0.135s时突然加载,在0.25s时,系统开始工作于能量回馈电网模式。图4给出了三电平PWM整流器母线电压波形。其中,图4(a)给出了a相网侧相电压(ea)、电流(ia)仿真波形,可以看出:电压电流相位一致,经计算功率因数在0.99以上;图4(b)给出了满载情况下,网侧电流波形及其频谱,谐波畸变率为2.00%;图4(c)给出了交流侧线电压波形;图4(d)和(e)分别给出了采用常规PI控制和滑模控制的直流母线电压(Vdc)波形,可以看出:在突加负载情况下,两种控制策略下的直流母线电压均有跌落,但采用滑模控制下的直流母线电压变化较小,并且迅速达到稳态。
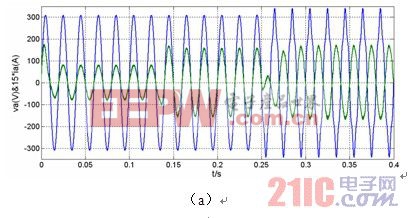
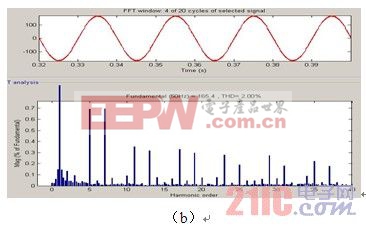
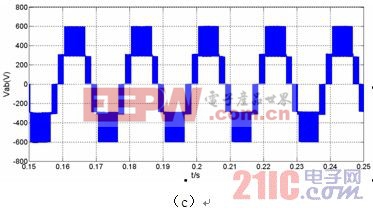
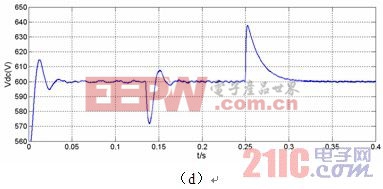
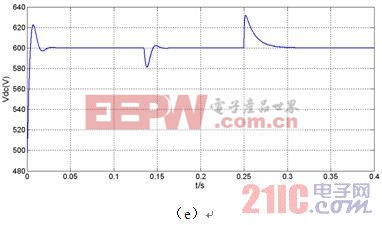
图4三电平整流器滑模控制仿真结果图:(a)网侧相电压、电流;(b)网侧电流及其频谱;(c)网侧线电压;(d)常规PI控制条件下直流母线电压波形;(e)滑模控制条件下直流母线电压波形
仿真结果表明:采用滑模控制策略,能够实现三电平PWM整流器的单位功率因数控制,系统具有良好的稳态性能。从直流母线电压波形可以看出,直流环节的动态响应比较快,负载加载的突变引起母线电压近18V的跌落。
5结语
本文建立了三电平PWM整流器的数学模型,并基于滑模控制原理设计了电路的控制策略。从仿真结果可知,该控制策略能较好地实现系统输出电压稳定,输入电流正弦、单位功率因数,具有良好的动态和稳态响应。
参考文献
[1]章浩,谢运祥等.基于滑模控制的三相高功率因数整流器.电气应用,2008,第27卷第10期.
[2]张颖超.中点箝位三电平双PWM变频器控制技术研究.清华大学工学博士学位论文,2008,47-49.
[3]张海涛.基于IGCT的三电平变频器的控制系统研究.清华大学工学博士学位论文,2006,47-49.
[4]金红元.三电平PWM整流器研究.华中科技大学博士学位论文,2006,51.
[5]胡庆,于海燕,夏桂文.滑模变结构控制在三相整流器中的应用.沈阳工业大学学报,2002,24(3):139-142.■












评论