
本文引用地址://m.amcfsurvey.com/article/201611/320239.htm
编码芯片PT2262发出的编码由:地址码、数据码、同步码组成。地址码和数据码都用宽度不同的脉冲来表示,两个窄脉冲表示“0”;两个宽脉冲表示“1”;一个窄脉冲和一个宽脉冲表示“F”,也就是地址码的“悬空”;同步码为时间较长的低电平间隔,下图为PT2262编码图:
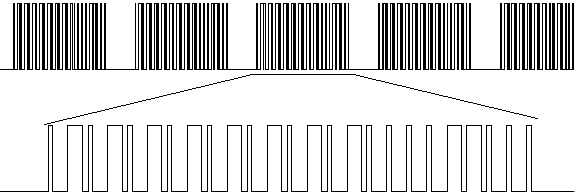
从图中可以看出,发送码的周期是相等的,只是脉冲宽度不同(宽脉冲与窄脉冲之比为3:1)。而同步码的低电平时间约为这个周期的8倍.
解码的关键是识别同步码,然后对后面的字码的脉冲宽度进行识别,就可以解出这个编码。pt2262每次发射时至少发射4组字码,每组字码由25个脉冲组成,前24个脉冲为地址和数据,最后一个脉冲和一低电平间隔组成同步码。下面我们来说说如何用51单片机对其进行解码。由于程序结构不复杂,就不再画流程图,首先我们让Timer0工作在定时状态,初始化值使其能在同步码未结束时溢出,利用Timer0的溢出中断来初始化,准备接收后来数据,同时将Timer0设为门控定时,也就是TMOD的GATE0位为1,此模式下,只有TR0=1并且INT0=1才计数,此模式可以用来测量脉冲宽度.这样就识别出了同步码.数据由INT0输入,INT0设为跳变触发,每中断一次就取TH0和TL0之和,这个和就是前一个的脉冲宽度.判断出是宽脉冲还是窄脉冲.由于上述的同步码周期与地址数据周期都远小于定时器0的定时时间,所在定时器0正常工作时,是不会溢出的.以下为程序,程序的功能是分别解出地址码与按键码(也就是数据码),然后用串口输出.解码时宽脉冲为1,窄脉冲为0.低位放到接收码的最高位,也就是解码结果与原数据位颠倒了.至于想要什么结果,可以做相应的处理,当然包括变换成地址的三进制格式.因为宽脉冲的脉宽与低脉冲的脉宽相差很大,所以解码很容易,下面为振荡电阻为1M时的程序,同样可用来解码振荡电阻为1.2M的编码.振荡电阻决定脉冲的宽度,可以修改程序来适应不同的震荡电阻,下面是c程序代码:
//测试条件:单片机为AT89S51,晶振12M,振荡电阻1MΩ
#include< AT89X51.h>
#include< stdio.h>
unsigned int addr,key;
unsigned char cntint;//外部中断0计数
void eint0(void)interrupt0//外部中断0
{
static unsigned int tempaddr;//接收地址缓存
static unsigned int tempkey;//接收数据缓存
unsigned int timecnt;
timecnt=TH0*256+TL0;
TH0=0;
TL0=0;
if(cntint<16)//接收地址码
{
tempaddr=tempaddr<<1;//将接收的到最低位移到最高位
if(timecnt>210)//210为宽脉冲与低脉冲界线,当振荡电阻为1M时,窄脉冲为110uS,宽脉冲为320uS
{
tempaddr|=1;//宽脉冲为1
}
cntint++;//中断次数加1
}
else if(cntint<24)//接收数据码
{
tempkey=tempkey<<1;
if(timecnt>120)
{
tempkey|=1;
