
STM8 MCKIT1.0 BLDC无感控制中的采集实现分析
ST写的STM8电机库中,可以用无感方式驱动BLDC。STM8芯片只有一个AD转换器,而且是8位机。库中要对反
本文引用地址://m.amcfsurvey.com/article/201611/322715.htm电势采集,比较处理,还要进行母线电压,母线电流、散热片温度、电位器等模拟信号进行采集、运算和处理。
这优先级处理说起来是很重要的。不过,ST把程序写的很好,至少我这样认为。它把不同的任务放到准确的时间段里进行采集处理。
先把它核心AD采集处理帖出来再分析 。
#ifdef SENSORLESS
@near @interrupt@svlreg void ADC2_IRQHandler (void)
{
if (ADC_State == ADC_SYNC)
{
// Syncronous sampling
u16 data;
u8 delay;
u16 bemf_threshold;
// Reset bit
bComHanderEnable = 0;
//clear interrupt flag
ADC2->CSR &= (u8)(~BIT7);
//left align - read DRH first
data = ADC2->DRH;
data <<= 2;
data |= (ADC2->DRL & 0x03);
switch( ADC_Sync_State )
{
case ADC_BEMF_INIT:
ADC2->CSR = (u8)((Current_BEMF_Channel|BIT5));
BEMF_Sample_Debounce = 0;
Zero_Sample_Count = 0;
ADC_Sync_State = ADC_BEMF_SAMPLE;
SetSamplingPoint_BEMF();
break;
case ADC_BEMF_SAMPLE:
//detect zero crossing
if( Current_BEMF == BEMF_FALLING )
{
if( Z_Detection_Type == Z_DETECT_PWM_OFF )
{
bemf_threshold = BEMF_FALLING_THRESHOLD;
}
else
{
bemf_threshold = hNeutralPoint;
}
if (Ramp_Step > FORCED_STATUP_STEPS)
{
if( data
Zero_Sample_Count++;
BEMF_Sample_Debounce++;
if( BEMF_Sample_Debounce >= BEMF_SAMPLE_COUNT )
{
hTim3Th -= hTim3Cnt;
GetStepTime();
SpeedMeasurement();
bComHanderEnable = 1;
BEMF_Sample_Debounce = 0;
}
}
else
{
BEMF_Sample_Debounce = 0;
}
}
}
else
{
if( Z_Detection_Type == Z_DETECT_PWM_OFF )
{
bemf_threshold = BEMF_RISING_THRESHOLD;
}
else
{
bemf_threshold = hNeutralPoint;
}
if (Ramp_Step > FORCED_STATUP_STEPS)
{
if( data > bemf_threshold )
{
Zero_Sample_Count++;
BEMF_Sample_Debounce++;
if( BEMF_Sample_Debounce >= BEMF_SAMPLE_COUNT )
{
hTim3Th -= hTim3Cnt;
GetStepTime();
SpeedMeasurement();
bComHanderEnable = 1;
BEMF_Sample_Debounce = 0;
}
}
else
{
BEMF_Sample_Debounce = 0;
}
}
}
break;
case ADC_CURRENT_INIT:
ADC2->CSR = (ADC_CURRENT_CHANNEL|BIT5);
ADC_Sync_State = ADC_CURRENT_SAMPLE;
SetSamplingPoint_Current();
break;
default:
case ADC_AVCURRENT_INIT:
ADC2->CSR = (ADC_AVCURRENT_CHANNEL|BIT5);
ADC_Sync_State = ADC_AVCURRENT_CHANNEL;// ADC_USER_SYNC_SAMPLE;
SetSamplingPoint_AVCURRENT();
break;
case ADC_CURRENT_SAMPLE:
ADC_Buffer[ ADC_CURRENT_INDEX ] = data;
break;
case ADC_AVCURRENT_SAMPLE:
ADC_Buffer[ ADC_AVCURRENT_INDEX] = data;
break;
}
// Store the current channel selected
bCSR_Tmp = ADC2->CSR;
// Set the Async sampling channel
switch (ADC_Async_State)
{
default:
case ADC_BUS_INIT:
ADC2->CSR = (ADC_BUS_CHANNEL|BIT5);
ADC_Async_State = ADC_BUS_SAMPLE;
break;
case ADC_TEMP_INIT:
ADC2->CSR = (ADC_TEMP_CHANNEL|BIT5);
ADC_Async_State = ADC_TEMP_SAMPLE;
break;
case ADC_USER_ASYNC_INIT:
ADC2->CSR = (ADC_USER_ASYNC_CHANNEL|BIT5);
ADC_Async_State = ADC_USER_ASYNC_SAMPLE;
break;
}
// Disable ext. trigger
ADC2->CR2 &= (u8)(~BIT6);
//Start ADC sample
ADC2->CR1 |= BIT0;
ADC_State = ADC_ASYNC;
if (bComHanderEnable == 1)
{
ComHandler();
}
}
else
{
// Syncronous sampling
u16 data;
data = ADC2->DRH;
data <<= 2;
data |= (ADC2->DRL & 0x03);
//clear interrupt flag
ADC2->CSR &= (u8)(~BIT7);
// Restore the sync ADC channel
ADC2->CSR = bCSR_Tmp;
// Enable ext. trigger
ADC2->CR2 |= BIT6;
// Manage async sampling
switch (ADC_Async_State)
{
default:
case ADC_BUS_SAMPLE:
ADC_Buffer[ ADC_BUS_INDEX ] = data;
ADC_Async_State = ADC_TEMP_INIT;
break;
case ADC_TEMP_SAMPLE:
ADC_Buffer[ ADC_TEMP_INDEX ] = data;
ADC_Async_State = ADC_USER_ASYNC_INIT;
break;
case ADC_USER_ASYNC_SAMPLE:
ADC_Buffer[ ADC_USER_ASYNC_INDEX ] = data;
ADC_Async_State = ADC_BUS_INIT;
break;
}
ADC_State = ADC_SYNC;
}
}
#endif
上面的代码我改了一点点,就是多采集了一路平均电流。
AD采集分两种,一个是同步,一个是异步。同步中有三个采集通道,异步中有三个采集通道。同步中的通道为反电势通道、瞬时电流、平均电流。异步采集中通道为母线电压、温度值、电位器。
异步采集是在同步完成后进行的。同步采集是通过TIM1的通道4触发采集。
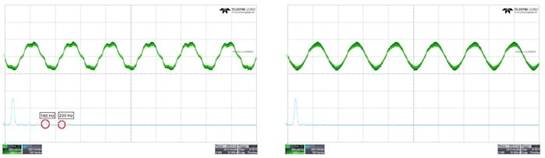
所以每个PWM周期采集2路模拟信号。异步采集的通道与PWM的ON与OFF状态无关,所以安排在异步采集中。同步采集中的反电势需要在PWM固定时刻采集,或ON或OFF,看BEMF的过零比较方案。瞬时电流一般在TON时刻采集。因为原来ST有PWM特殊时刻做了一路用户通道中,所以我就把平均电流加到这一通道上了。其实平均电流采集也可以放到异步中。无所谓了,功能实现是没问题的。
另外,异步采集中的反电势通道一直是设为浮空相的通道的。而且反电势的采集在D与Z之间,即退磁结束与过零点之间进行的异步采集均为反电势,而瞬时电流的采集是在Z与C之间,即过零与换相之间进行的异步采集均为瞬时瞬时电流。所以用户的通道(平均电流)就是在换相与退磁之间了。
ST的无感方案,启动方案感觉只能针对工业用电机,像在4极对下4K转速的电机,那启动参数不用怎么改。但如果改为航模电机,无论启动PWM改为多少,总是不能启动成功。可能是我还找到巧门,也可能没设对参数,对于高速电机,像这种无感启动可能是升频升压法启动才可靠。我早期写的例程,无论什么电机,用的是升频升压法,无论什么电机,都可以正常启动,只是启动过程(大约1S)电流从大到小,,至少正常运行至最小电流值。










评论