
三相异步电机双闭环调速控制系统设计
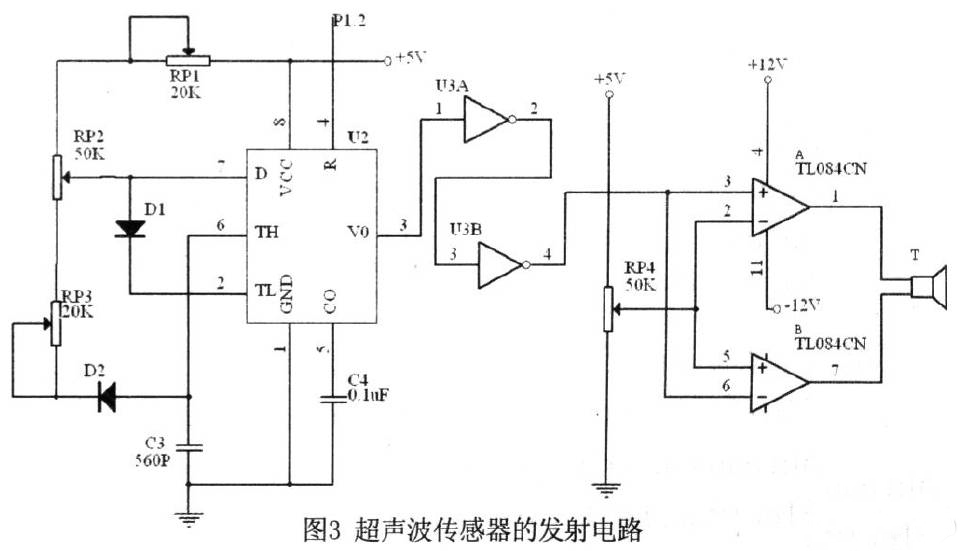
其中,给定速度由键盘输入接口电路输入AT89S52单片机控制系统,速度PI调节、电流PI调节、磁场位置角和转速反馈量的计算由TMS320 LF2407A计算实现。测得的电机转速通过AT89S52控制系统输出到液晶显示单元上实时显示。
假设电机定转子三相绕组完全对称;定转子表面光滑,无齿槽效应,定转子每相气隙磁动势在空间呈正弦分布;磁饱和、涡流及铁心损耗均忽略不计,则三相交流异步电动机的转矩方程如下:![]()
式中:Lr,Lm分别为转子自感和互感;p是微分算子;isq是定子电流在q轴上的分量;ψrd是转子磁链在d轴上的分量。
从式(1)可以看出,异步电机的转矩与定子电流矢量和转子磁场以及夹角有关。因此,要想控制转矩,必须先检测和控制磁通。当dq坐标系在同步旋转磁场上且静止坐标系中的各交流量转化为旋转坐标系中对应的直流量时,使d轴和转子磁场方向重合,可得到磁场定向控制方程如下:
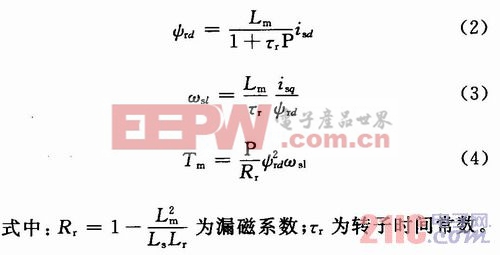
由式(2)可知,检测到定子电流的d轴分量(励磁分量)可观测出转子磁通幅值;由式(4)可知,当ψrd恒定时,只要控制定子电流的q轴分量(转矩分量),即可控制电磁转矩。具体工作原理如下:
通过电流传感器测量逆变器输出的定子电流iA,iB,经过DSP的A/D转换器转换成数字量,并利用ic=-(iA+iB)计算出ic。电流iA,iB,iC通过Clarke变换和Park变换得到了dq坐标系下的励磁反馈电流isd和转矩反馈电流isq,与给定的励磁电流isdref和转矩电流isqref的差通过PI调节后,再经过Park逆变换输出αβ坐标下的电压,DSP利用该电压生成三相逆变器所需的六路驱动信号。实时测量的电机转速信号一方面用于与给定速度比较产生isqref,另一方面进入电流一位置磁链转换模型求出磁链的位置,并用于Clarke和Park逆变换。
3.2 程序流程图
AT89S52单片机控制系统上电后,首先通过键盘输入接口输入给定转速,单片机将给定转速存储在双口RAM中,同时,给定转速通过单片机P0口输出到液晶显示单元的驱动控制芯片SED1520,由SED1520驱动OCMJ4X8B-2显示转速,转速的显示范围为O~9 999 r/min,然后通过键盘来确定是否要对相关变量采样并存储。该部分程序流程图如图4(a)所示。
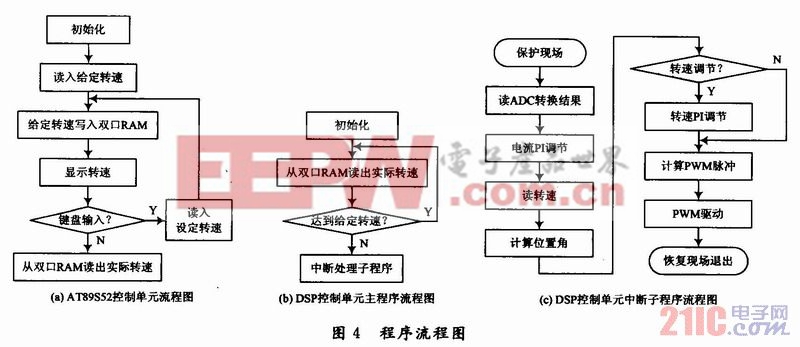
其次给TMS320LF2407A DSP控制系统上电,运行初始化程序完成初始状态的设定(包括对相关变量采样数据存储等),DSP控制系统对电机转速和电枢电流采样,与给定值进行比较,若达到设定转速,则循环运行,当给定转速改变时,进入中断处理子程序。主程序流程图和中断处理子程序流程图分别如图4(b)和图4(c)所示。
矢量控制相关文章:矢量控制原理

三相异步电动机相关文章:三相异步电动机原理
锁相环相关文章:锁相环原理



评论