
基于DSP的变频调速控制系统的软件设计
随着现代交流电机调速控制理论的发展和电力电子装置功能的完善,特别是微型计算机及大规模集成电路的发展,交流电机调速取得了突破性的进展。恒压频比(U/F=常数)的控制方式是转速开环控制,无需速度传感器,控制电路简单,负载可以是通用标准异步电动机,所以通用性强,经济性好,是目前通用变频器产品中使用较多的一种控制方式,普遍应用在风机、泵类的调速系统中。
本文引用地址://m.amcfsurvey.com/article/227550.htm电压空间矢量法(SVPWM),也叫“磁链跟踪控制”,和经典的SPWM控制着眼于输出电压尽量接近正弦波不同,它是从电动机的角度出发,着眼于如何使电机获得幅值恒定的圆形旋转磁场。
本系统设计了以TMS320LF2407A为中央处理器的硬件平台,通过SVPWM控制方法对交流电机实现恒压频比控制。并在此基础上给出了变频调速控制系统的软件设计。
1 空间电压矢量PWM原理
理论分析表明:三相对称正弦电压产生幅值恒定、以恒转速旋转的电压空间矢量,而这种电压空间矢量加到电机上时将产生幅值恒定、以恒转速旋转的定子磁链空间矢量,且定子磁链矢量顶点的运动轨迹形成圆形的空间旋转磁场。因此,电动机旋转磁场的轨迹问题可转化为电压空间矢量的运动轨迹问题。
SVPWM法就是从电动机的角度出发,把逆变器和交流电动机视为一体,着眼于如何使电机获得幅值恒定的圆形旋转磁场。
1.1 基本电压空间矢量
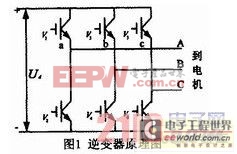
图1是一个通用的电压型PWM逆变电路。图中的V0-V5是6个功率开关管,a、b、c分别代表三个桥臂的开关状态。对于每一个桥臂都有两种工作状态,“上管导通,下管关断”,称为“1”状态,“下管导通,上管关断”,称为“0”状态。三个桥臂只有“1”或“0”两种状态,因此a、b、c形成000、001、010、011、100、101、110、111共八个开关模式。其中000和111开关模式称为零状态。
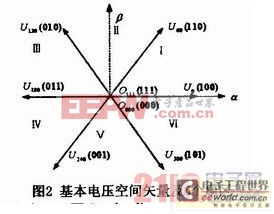
8个开关模式分别对应8种基本电压矢量。根据其相位角的特点分别命名为:O000、U0、U60、U120、U180、U240、U300、O111。按6个有效工作矢量将电压矢量空间分为对称的6个扇区,如图2所示:
1.2 电压空间矢量的合成
每个有效工作矢量在一个周期内只作用一次的方式只能生成正六边形的旋转磁场,如果设法使定子里形成正多边形旋转磁场,我们就可以得到近似的圆形旋转磁场。而且,正多边形的边越多,近似程度就越好。
但是如果想获得尽可能多的多边形旋转磁场,就须有更多的逆变器开关状态。我们可以利用六个非零的基本电压空间矢量的线性时间组合来得到更多的开关状态,这就是电压空间矢量PWM的基本思想。
在电压矢量空间的6个扇区中,当期望的输出电压矢量落在某个扇区时,就用该扇区的两条边等效合成期望的输出矢量。
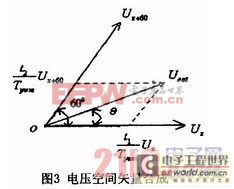
在图3中,Ux和Ux±60代表相邻的两个基本电压空间矢量;Uout是输出的参考相电压矢量,其幅值代表相电压的幅值,其旋转角速度就是输出正弦电压的角频率。Uout可由Ux和Ux±60线性时间组合来合成,它等于t1/Tpwm倍的Ux与t2/Tpwm倍的Ux±60的矢量和。其中t1和t2分别是Ux和Ux±60和作用的时间;Tpwm是Uout作用的时间。由期望输出电压矢量的幅值及位置可确定相邻的两个基本电压矢量以及它们作用时间的长短,并由此得出零矢量的作用时间大小。
设计的系统以TMS320LF2407A为核心控制器,电路组成包括主电路、系统保护电路和控制电路三大部分,其总体设计图如图4所示。

陀螺仪相关文章:陀螺仪原理














评论