
二相混合式步进电机的高性能驱动器研究

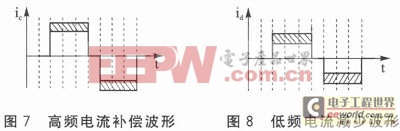
如图7阴影部分所示,电机高频运行时,为使电机绕组在短时间内仍能获得足够驱动电机运转的能量,在原先设定的电流波形的基础上额外增加供给电流,补偿减少的部分,提高相应的牵出转矩。低频时,为防止电流过剩,导致低频振荡,实时减少电流供给,如图8阴影部分所示。
保证电流的有效补给,f与u的变化呈现一个非线性关系模型,并与Logistic生物增长模型近似逼近。逻辑斯谛是一类非线性回归模型,提出这个模型的初衷是为了解释新物种在生态系统的增长变化趋势。当一个物种迁徙到一个陌生的生态系统,而且该物种的起始总数量小于新的生态系统的最大容纳量,则数量会增长,增长趋势满足逻辑斯谛方程。Logistic模型表达式为
式中x是自变量,y是x的函数,a、β、k是待定的常数。
物种到达一个新环境后的增长趋势如图9所示。从最初的起始值增长至平衡值,即式(7)中的常数a;β决定初始值的大小,β大于0时起始值落于最大值的下方,等于0时y为一条直线,小于0时起始值大于最大值a;而k是增长快慢的常数,k越大增长速度越快,且k只能为正数。
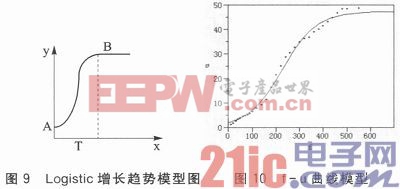
电机的绕组电压与频率的最佳曲线关系如图10所示。
由此得出电压和频率的驱动方程。![]()
式中f为频率,u为电压,a、b和c为驱动系数,e为自然对数的底数。在f的增大过程中,u的变化趋势是先缓慢,再急剧,最后慢慢趋近于a,即设定的最大驱动电压值。
4 实验与结论
电机选用无锡三拓二相混合式步进电机57HS5125A4,额定电流2.5 A,最高起动频率约为200 Hz,步距角1.8°。若PWM最终信号频率设置为500 Hz,则f=0.8×500 Hz=400 Hz。在加速至400 Hz时采用台阶缓慢升速;减速过程由20%余量的台阶实现。选取合适的b值可以确定加速时间,b取0.05,加速时间约为0.3 s,减速时间为0.05 s,加速不失步,上升快而稳,是一种比较合适的升速曲线;减速没有过冲现象。二者形成最佳升降速控制曲线。
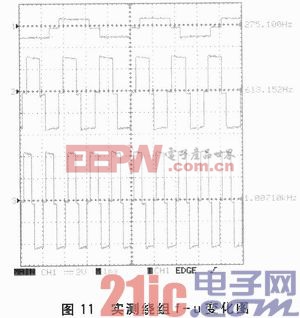
该设计方案已做成实物并在使用之中,测得某一相绕组电压和频率之间的波形变化关系,如图11所示。频率和电压采用逻辑斯谛模型电压控制方式,绕组脉冲信号的频率越高,供电电压也越来越高,电流实时补偿,波形毛刺较小,验证了本方案的正确性。
经过测试及长时间使用证明,该驱动器具有低频稳定、高速有转矩、适用范围广、工作可靠和矩频特性较好等优点,现已投入实际使用。

pwm相关文章:pwm是什么











评论