
PID控制在柔性结构控制中的应用
网络的权系数修正采用一阶梯度法(最速下降法),并附加使搜索能快速收敛于全局极小点的惯性项


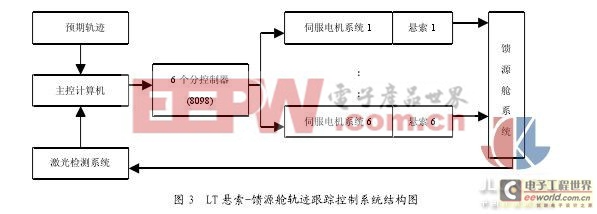
2 LT悬索-馈源舱轨迹跟踪控制系统的结构及原理
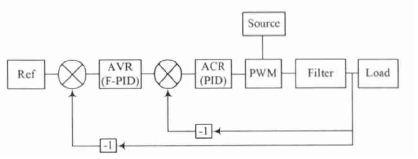
LT 悬索-馈源舱轨迹粗调跟踪控制系统是由各个互连的子系统组成的非线性慢时变大滞后柔性系统,这种系统的关键是如何处理各个子系统的关联性,而利用局部信息对各子系统进行分散控制是最有效的方法,因此采用分散控制,其系统结构如图3 所示。馈源舱轨迹跟踪过程中,激光检测系统实时检测馈源舱在空中的实际轨迹,并与预期轨迹进行比较,由主控计算机根据上述的偏差信号实现每根索长的实时规划,求得索长输入给相应悬索的分控制系统, 分控制系统通过合适的控制算法控制伺服电机的转速,从而控制馈源舱在空中的运动轨迹满足轨迹跟踪精度的要求。也就是说,主控计算机主要完成每根悬索的运动轨迹规划,即悬索运动协调问题是由主控计算机来保证的;而每根悬索的位置执行精度是由其相应的分控制系统中的控制算法来保证的。由于 6 根悬索的分控制系统中的控制算法是相同的,在此仅取其一来研究。单根悬索闭环位置控制系统主要由 8098 单片机、PWM 功率放大器、交流伺服电机、悬索和增量式光电编码器组成。
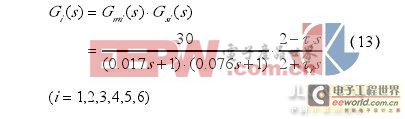
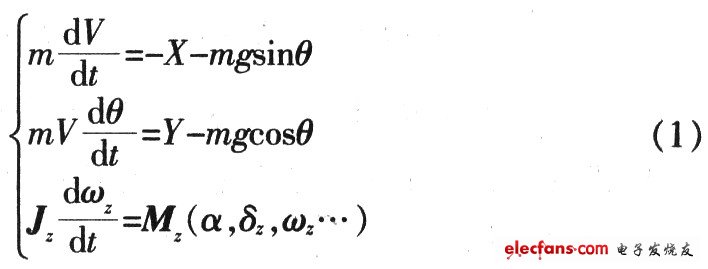
虽然不能精确建立悬索-馈源舱系统的数学模型,但可用伺服电机的二阶惯性环节加悬索的纯滞后环节来等效,并采用一阶 Pade 近似纯滞后环节。单根悬索-伺服电机的传递函数可表示为[7]
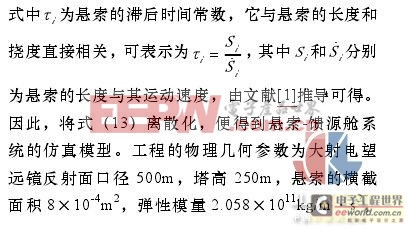
密度 7.85×103kg/m3,馈源舱总重量 2×104kg。






评论