
空心轴不带内置轴承的角度编码器
这些电机的位置编码器相应地也许要单独的设计。编码器的空心轴内径相应需要50mm。对于带摆动轴的机床旋转工作台轴,其轴径由0.5 米到几米。 如望远镜电机的方位和提升轴要求的直径在5 米以上。
设计人员希望将编码器内置于电机或轴承中从而模块化。如果电机轴承和测量轴达到一定的精度,编码器可以不用内置轴承。本文主要介绍用于带空心轴的驱动电机的模块式编码器的研究动态以及该编码器的特征和与其它设计的对比。
精度和扫描原理
旋转编码器和角度编码器的精度定义为一圈内及一个信号周期内的位置偏差如(图 1)。模块式编码器在一圈内的位置偏差主要是由刻度盘相对于扫描头的径向跳动和刻度本身的误差引起的。

图 1:一个信号周期内的位置偏差u (上图) 和一圈内的位置偏差a (下图)
上述两种位置偏差对驱动特性具有实质性的影响(表1)并要越小越好,尤其是数字式速度一个信号周期内的偏差控制。由于实际位置值决定了实际速度值,因而编码器的位置偏差决定了控制特性。
表 1: 模块式编码器对驱动特性的影响
扫描原理决定了光栅周期和扫描头与光栅之间的间隙的公差。一个信号周期内的位置偏差见下表 (表 2):
表 2: 无接触式扫描原理的对比
不带内置轴承的旋转和角度编码器的精度主依赖于与其相配轴的轴承精度和用户安装编码器的安装精度。
图 2 表明由于码盘与被测量轴的不对中度引起的位置偏差。通常要达到± 1 角秒到 ± 5 角秒,来自轴承和安装误差的径向跳动量要小于1 μm。该值是在负载下得到的,即考虑了工件重量和操作力。
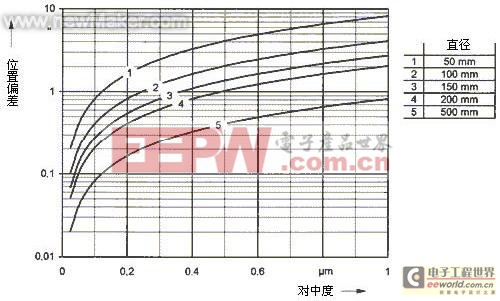
图 2: 对中度对精度的影响
不带内置轴承的编码器要求用户进行良好的安装;而不象那些带内置轴承编码器,制造商已进行优化设置了。见 (表 3)。
表 3: 带和不带内置轴承的编码器的对比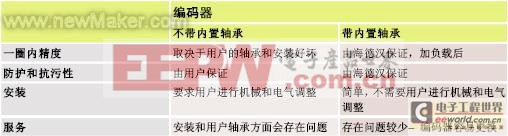
磁式旋转编码器的扫描原理
对于无框架电机或空心电机,所用的空心轴编码器的内径通常约为40 mm 到 180 mm。 如果用带内置轴承的编码器就太不经济了,如果精度不超过10 角秒,也不需要这样的编码器。已有的轴承或电机轴承允许使用光栅式编码器。但是通常的安装环境会使光电扫描的编码器受到空气中的灰尘和油汽的污染,因而需要封装。对于高达20 000 rpm 和这么大的直径的编码器,显然这样的防护是不且实际的。对于这情况,海德汉研发了磁阻扫描原理的模块式编码器。ERM 180 增量式模块式旋转编码器是由磁毂和扫描头两部分组成的,见 (图 3)。

图 3: 磁阻扫描原理的ERM 180 增量模块式旋转编码器
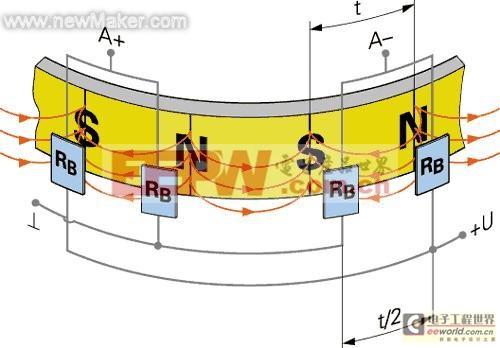
图 4: ERM 180 旋转编码器的磁阻扫描原理

图 5: 安有ERM 180 磁阻模块式旋转编码器的车床主轴
表 4: ERM 180 增量磁阻式模块化旋转编码器的主要特性 (例)
到512,取决于编码器的直径。位置偏差通常是ERM 180 的二到四倍。不象齿轮编码器ERM所能达到的精度不依赖于电子元气件,它所扫描的刻度周期较大且稳定,即使在较高的操作温度下对输出信号的影响也非常小。海德汉还有光电扫描原理的ERA 180 角度编码器,它是轴向光栅编码器,一个信号周期内的位置偏差比ERM 编码器要小5 到10 倍。ERA 180 只可用于清洁的环境。
表 5: ERM 180 所允许的最高转速
向偏置误差为 ± 1 mm 包括扫描头的安装误差和电机温度影响造成的轴承浮动误差。只要轴向窜动在此范围内就不会对位置偏差有影响。编码器输出高质量正弦信号,信号幅值为 1VPP。允许的最高温度为100 °C。最高轴速取决于编码器的外径。齿轮式编码器的齿形在高转速下会产生啸叫声。而ERM 180 却是平稳安静的。
ERM 180 非常容易安装:轮毂安装在与之相配的轴上,并用螺栓紧固。轮毂的内径与对中环对中。用安装片设定扫描头与轮毂外圈的间隙。将扫描头靠紧安装片固定后,再将安装片移出。
光电式准单一场扫描原理的角度编码器
直径大于500 毫米的旋转轴, 摇摆轴或旋转工作台需要用准确度为角秒级或准确度更高的角度编码器。对于1 米直径的转台,编码器位置偏差为 ± 2 角秒, 将会在其圆周上产生± 5 μm的位置偏差。
ERA 780 和 ERA 880 模块式角度编码器是为这种应用场合设计的。这种编码器是海德汉开发的采用准单一场扫描原理,刻度周期为40 微米,钢带标尺式的角度编码器。这种扫描方法的扫描掩模是由交错的相位光栅组成,利用准单一扫描场原理产生四个标准扫描掩模的影象,每个影象具有1/4 光栅周期的相位移(图 6)。

图 6a:钢带标尺和准单一场影像扫描原理 (反射光)
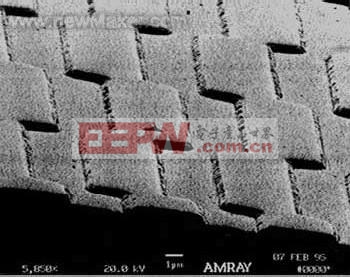
图 6b:扫描掩模的电子放大图
图 7: 污染示意图

图 8: 污染效应
(图中上半部分为普通的四场扫描原理, 下半部分为准单一场扫描原理, 右图为 Lissajous图)












评论