
微型足球机器人行为产生方法与实现
摘要:将整个赛场划分成10个区域,分析了机器人在活动区域的基本行为,确定了不同情况下的有利目标点和反应条件,建立了机器人行为触发机制。该行为产生方法将角色分配和行为产生相结合,使场上每个机器人随时都有明确的目标和行为,结构层次分明,实时性强,便于升级。
关键词:机器人足球策略行为产生角色分配反应行为
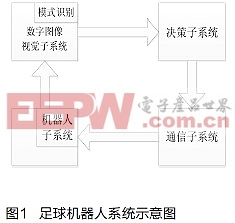
机器人足球赛为机械设计、自动控制、人工智能、计算机视觉等提供了一个良好的研究与试验平台,已成为一个热门研究课题。微型机器人足球赛是机器人足球赛中最基本的一种,它由视觉子系统、无线通信子系统、策略子系统以及足球机器人子系统组成。比赛是在策略子系统指挥下自主进行的,每秒钟要处理25或30帧图像。当拥有了良好的硬件设备后,整个球队水平主要决定于策略子系统的水平。其主要任务包括:场上攻防态势判断、球队中每个机器人角色划分及任务分配、机器人运动规划、机器人问相互配合等。由于场上形势千变万化,决策时间又相当短暂,所以如何构建一个良好的策略子系统成为研究的重点。文献[5]采用实时自组织模糊决策树进行决策,将球所在区域以及双方控球状态划分成12种情况,针对每种情况提出了相应的策略。由于判断条件比较复杂,实施起来难以达到满意的效果。文献列出了常见的反应行为,并给出了有利目标点的计算方法。其缺点是没有给出一种合适的行为触发机制。本文分析了机器人应有的几种反应行为,确定了策略研究重点,提出了一种新的队员角色分配策略,可以根据不同的情况产生不同的行为并动态地分配给相应的机器人;设计了一套行为触发机制,能及时合理地触发反应行为,从而保证场上每个机器人随时都有明确的目标和行为。
1 场地的划分
根据比赛过程分析,将球场划分成如图l所示几个区域。区域l、2、3、4为角区,5、6为边界区域,区域7为防守区,区域8为进攻区,区域9、10分别为我方禁区和对方禁区。

2 行为标志及有利目标点的确定
2.1足球机器人应有的反应行为及其条件
下面分析攻,防队员的基本行为。守门员的动作行为比较特殊,可参见文献。综合分析足球机器人的场上行为,可划分为如下几类:
(1)射门
当机器人离球较近且处于较有利的位姿时,如图2所示,应毫不犹豫地进行射门以破门得分。射门行为的触发条件为:
①机器人与球的距离d小于某个临界值d0,在实验中取d0=30cm;
②机器人的朝向与机器人和球连线方向的夹角AB小于某个临界值岛θ0,在实验中取θ0==30


评论