
基于AT89C51+DSP的双CPU伺服运动控制器的研究
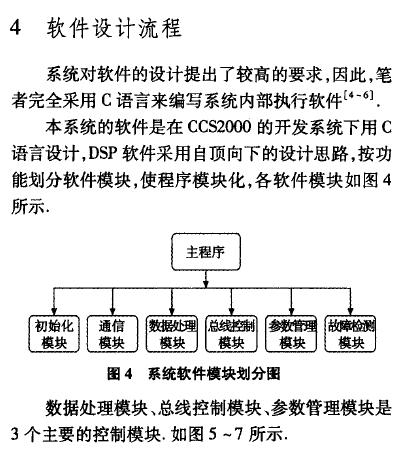
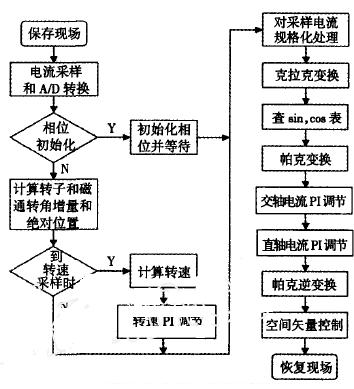
图5 数据处理模块子程序框图
5 实验研究
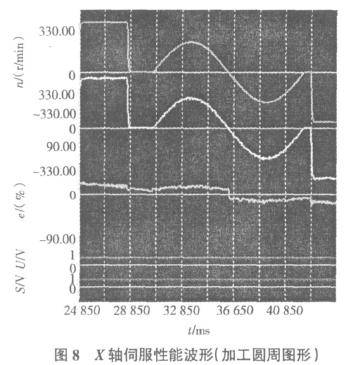
伺服系统是数控装置和机床的联系环节,伺服系统的性能,在很大程度上决定了数控机床的性能. 本文在一台HANUC CNC2000 i系统中进行了实验研究, 给出了其中一轴的伺服性能波形图。图8和图9给出了CNC2000 i系统的加工程序的X 轴交流伺服系统的性能波形, 5个通道分别为速度指令n (单位: r /min) , 反馈速度n (单位: r /min) ,转矩图形误差e (% ) ,零偏差U (单位: V) ,定位完成信号S (单位:V) .从实测波形图中可以看出,该伺服系统具有良好的位置跟踪性和准确的定位控制精确度.
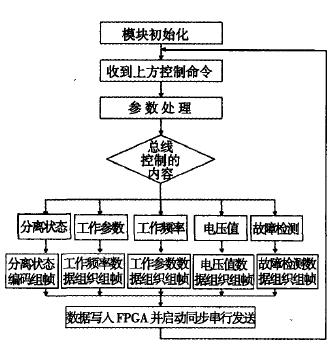
图6 总线控制模块流程图
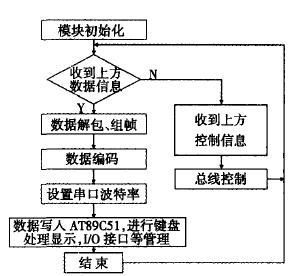
图7 参数管理模块流程图

6 结 语
由于采用单片机与DSP配合,系统的运算和实时处理的能力大大增强,可以适应多坐标轴、高速度、高精确度的数控系统,实现单处理器系统难以实现的功能. 与由单处理器完成所有任务的情况相比,该方法允许较短的插补周期,实现更高的进给和伺服控制精确度. 并经实验证明该伺服运动控制器反向速度快、定位时间短、转矩恒定,具有良好的线性调速特性及动态性能.
linux操作系统文章专题:linux操作系统详解(linux不再难懂)
伺服电机相关文章:伺服电机工作原理
脉宽调制相关文章:脉宽调制原理
矢量控制相关文章:矢量控制原理






评论