基于DSP高精度伺服位置环设计 作者:暨绵浩 广州数控设备有限公司 时间:2009-06-15 来源:电子产品世界 收藏 离散PID控制算法如下:本文引用地址://m.amcfsurvey.com/article/95275.htm 式中,为饱和前的输出,KP为PID控制的比例增益,Ti为PID控制的积分时间常数,Td为PID控制的微分时间常数,Kc为退饱和时间常数。 位置控制器的控制算法 位置控制器采用比例加前馈控制结构,如图3所示,其中Gm为电机的传递函数,Gspd为速度环的传递函数,Gpos为位置环的传递函数,Fpos为位置前馈控制器传递函数。 系统的传递函数为: pid控制器相关文章:pid控制器原理 上一页 1 2 3 4 5 6 下一页
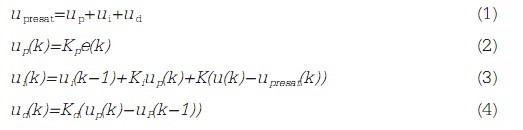
 为饱和前的输出,KP为PID控制的比例增益,Ti为PID控制的积分时间常数,Td为PID控制的微分时间常数,Kc为退饱和时间常数。
为饱和前的输出,KP为PID控制的比例增益,Ti为PID控制的积分时间常数,Td为PID控制的微分时间常数,Kc为退饱和时间常数。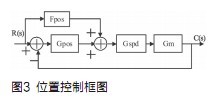
















评论