- 实现数据的高速大容量存储是数据采集系统中的一项关键技术。本设计采用Altera 公司Cyclone系列的FPGA 完成了对DDR SDRAM 的控制,以状态机来描述对DDR SDRAM 的各种时序操作,设计了DDR SDRAM 的数据与命令接口。用控
- 关键字:SDRAMFPGADDR控制器
- “我们在NI CompactRIO平台上开发的SVC全数字控制系统,大大缩短了产品上市的时间又保证了系统的稳定性。”
挑战:电弧炉、轧钢机等大型工业设备在为企业创造产值的同时也带来了无功分量和高次谐波等危害
- 关键字:FPGA静态控制器
- LTC 4353控制外部N沟道MOSFET来实现一个理想的二极管功能。它取代了两个高功率肖特基二极管和其相关的散热器,节省功耗和电路板面积。理想二极管的功能,允许低损失电源ORing和供应滞留应用的。LTC4353调节横跨正向
- 关键字:低电压理想二极管控制器
- 现场可编程门阵列(FPGA)作为专用集成电路(ASIC)领域的一种半定制电路,可以根据设计的需要灵活实现各种接口或者总线的输出,在设备端的通信产品中已得到越来越广泛的使用。FPGA 是基于静态随机存储器(SRAM)结构的,
- 关键字:FPGACPLD控制器从并加载
- 与其它的嵌入式系统相比,单片机的体积小,但是集成度高,具备较高的可靠性与控制功能;功耗低且采用低电压,因此对便携式产品的制造与生产十分有利;具备较好的扩展性与优异的性能比,其应用范围十分广泛
- 关键字:嵌入式系统运算器控制器存储器
- 运动控制系统已被广泛应用于工业控制领域。近年来,工业控制对运动控制系统的要求越来越高。传统的基于PC及低端微控制器日渐暴露出高成本、高消耗、低可靠等问题,已经不能满足现代制造的要求 。
- 关键字:运动控制控制器嵌入式四轴运动
- 随着微控制器性能的不断提高,嵌入式应用越来越广泛。但是目前市场上的大型商用嵌入式实时系统,价格昂贵,而且都针对特定的硬件平台。对于中小型系统开发,购买商用实时系统并不划算。
- 关键字:微控制器驱动程序控制器嵌入式应用
- 随着用电设备对高品质的电源和电能质量的需求日益增多,高性能逆变电源的研究越来越受到关注。首先介绍了逆变电源技术的发展现状,在介绍了TMS320F2812芯片的特性之后,详细分析了基于TMS320F2812逆变电源控制器的硬件和软件设计,并对仿真结果进行分析总结。结果表明,该逆变电源能够得到稳定的正弦波输出。
- 关键字:TMS320F2812逆变电源控制器正弦波
- 为了使Maxim公司的光微控制器DS4830满足光收发模块SFF-8472协议(光收发器件动态诊断监控接口协议)中的多I2C总线从机地址的要求,根据DS4830内部I2C总线主从模块及集成开发环境IAR的特点,设计了DS4830作为I2C总线从机的硬件及软件。实验证明,该设计满足SFF-8472协议中关于I2C总线从机的要求。
- 关键字:控制器DS4830

- 介绍了无人机载光电任务设备升降机构的工作原理、结构组成及其控制器设计。控制器采用C8051F320单片机,驱动电路选用高集成度、高性价比、高可靠性和高效率的驱动芯片MSK4310实现。与传统分立元件方法相比,简化了80%的电路设计,节省了50%的结构尺寸。系统实现了光电任务设备的自主升降以及到位停止等自动控制功能。
- 关键字:升降机构控制器自主升降到位停止
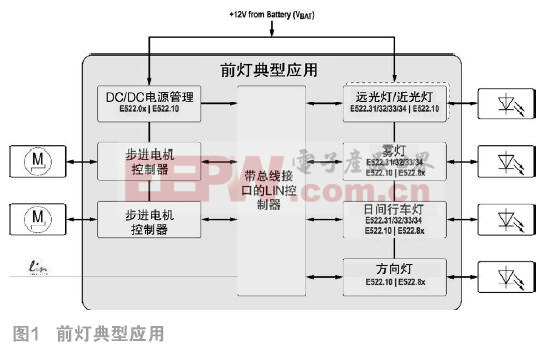
- 汽车上的转向灯不再是只能一闪一灭了。现在的LED光带中发光颗粒可以以一定次序亮灭,光带看上去像发光虫子朝着汽车转向或者变道的方向直直地游去。现在不仅仅转向灯可以实现上述功能,全车的照明都已经发展成可以以上述方式开启和熄灭。随着LED灯具应用领域越来越广泛,研究分析用于控制LED灯的转换器拓扑结构也就越来越迫切了。
- 关键字:车用LED照明控制器拓扑结构201610
- 基于DSP的电子负载技术文献汇总, 电子负载的原理是控制内部功率MOSFET或晶体管的导通量(量占空比大小),靠功率管的耗散功率消耗电能的设备,它能够准确检测出负载电压,精确调整负载电流,同时可以实现模拟负载短路,模拟负载是感性阻性和容性,容性
- 关键字:电子负载DSP功率电路设计采样点路控制器
- 嵌入式系统解决方案领域的领导者赛普拉斯半导体公司(纳斯达克股票交易代
- 关键字:存储器分辨率控制器

- Molex 推出 SST™ PB3-CPX 模块,可将罗克韦尔自动化的 CompactLogix L2、L3 和 L4 控制器连接至 PROFIBUS DP-V0 及 DP-V1 网络。此类模块可为工业自动化应用实现高性能、低成本的解决方案,并且与 Master DP-V0 Class-1、Master DP-V1
- 关键字:Molex控制器
- 着重分析了两轮自平衡小车的设计原理与控制算法,采用卡尔曼滤波算法融合陀螺仪与加速度计信号,得到系统姿态倾角与角速度最优估计值,通过双闭环数字PID 算法实现系统的自平衡控制。设计了以MPU-6050传感器为姿态感知的两轮自平衡小车系统,选用8位单片机HT66FU50A为控制核心处理器,完成对传感器信号的采集处理、车身控制以及人机交互的设计,实现小车自主控制平衡状态、运行速度以及转向角度大小等功能。
- 关键字:两轮自平衡姿态检测卡尔曼滤波数据融合PID 控制器201603
控制器介绍
控制器是整个可视电话系统的控制核心。在系统启动时,它负责初始化系统中的各软硬件模块。举例说明:当调制解调器开始数据传输后,主控制模块初始化各内部变量,然后通过通信口向对方送 16 个同步标记以及 H.245 的各种消息,完成能力交换、主从决定等,最后打开语音、视频通道,初始化结束,正式通信开始。在通信过程中,主控制模块维护其他各软、硬件模块的正常。其工作过程一般如下:终端A电源接通后,控制器首先从 [
查看详细]
关于我们-
广告服务-
企业会员服务-
网站地图-
联系我们-
征稿-
友情链接-
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473