
- 引言
深海作业机器人是一种在水深5000~6000米的海底沉积物上行走、采集锰结核的智能履带车辆,两条履带由安装在后轮上的两台液压马达分别驱动,用变量泵调节速度。我国采矿区位于太平洋中部,为典型的深海平原,
- 关键字:控制防滑行走机器人海底
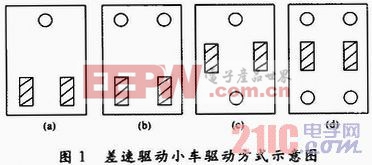
- 摘要:为了让电磁屏蔽效能自动测试装置能够在屏蔽室中按照已给定的路径运动,设计了一种开环控制的两轮差速驱动小车,对其运动学进行了分析,并采用双圆弧拟合曲线方法使小车实现按照给定曲线行走。通过大量运动实验
- 关键字:方法行走曲线小车驱动
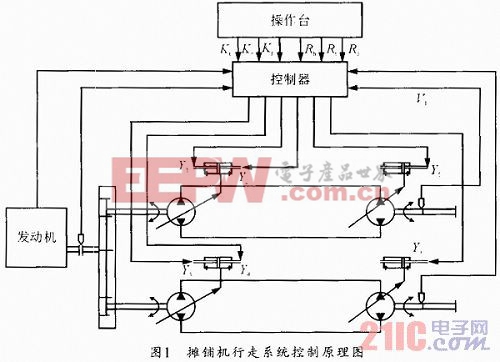
- 摘要:对沥青混凝土履带式摊铺机行驶系统纠偏控制进行了研究,提出了在模糊PID控制摊铺机恒速性能的基础上引入左右履带里程关联的方法来解决摊铺机行走过程中跑偏的问题通过现场试验,证明了模糊PID加左右履带里程关
- 关键字:纠偏算法研究控制系统行走PLC摊铺机基于
行走介绍
您好,目前还没有人创建词条行走!
欢迎您创建该词条,阐述对行走的理解,并与今后在此搜索行走的朋友们分享。
创建词条
关于我们-
广告服务-
企业会员服务-
网站地图-
联系我们-
征稿-
友情链接-
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473
