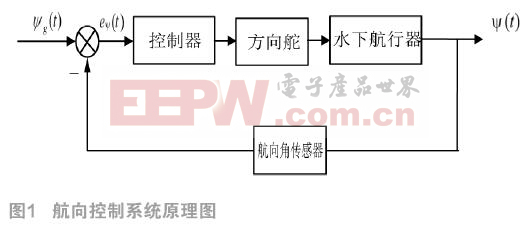
- 水下航行器操控性能指标中对定向性能有较高要求,而水下航行器的运动具有强的非线性和耦合性,使得不同航速下定向控制和定深转向综合控制成为难点。本文建立了水下航行器的运动学模型,基于滑模理论设计了航向控制器,在MATLAB SIMULINK环境下搭建了航向控制仿真系统,数值仿真结果表明,滑模变结构控制器对于不同航行条件具有较强的适应性,同时,航向的控制效果明显优于PID控制器。
- 关键字:水下航行器滑模变结构控制PID定向控制20170203
滑模变结构控制介绍
您好,目前还没有人创建词条滑模变结构控制!
欢迎您创建该词条,阐述对滑模变结构控制的理解,并与今后在此搜索滑模变结构控制的朋友们分享。
创建词条
关于我们-
广告服务-
企业会员服务-
网站地图-
联系我们-
征稿-
友情链接-
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473
