
- 要实现自主,机器人不仅仅只需要人工智能(AI),还需要很多传感器、传感器融合以及边缘实时推理。由于深度卷积神经网络的优点已得到公认,激光雷达对更为先进的数据处理的需求正在把神经网络推向新的拓扑结构,以实现自主。第一个机器人在20世纪50年代末、60年代初诞生,但严格意义上它不算机器人,只是一台“可编程的物品传送设备”,它被用于移动通用汽车公司生产线上压铸机周围的产品。1954年专利的第一句话强调了本发明的可编程性和通用性,并且表明可编程性要求传感器确保程序、期望轨迹或功能和实际运动之间的一致性。时至今日,
- 关键字:机器人自主嵌入式
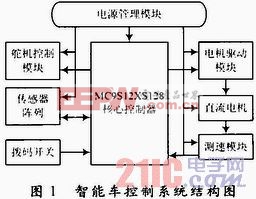
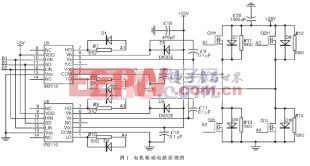
- 摘要:设计了一种基于激光传感器的自主寻径智能模型车系统,以飞思卡尔公司1 6位单片机MC9S12XS128为核心控制器;系统采用激光传感器阵列检测路径信息,得到智能车与路径的横向偏差,采用比例控制算法控制舵机转向,
- 关键字:智能设计自主传感器激光基于
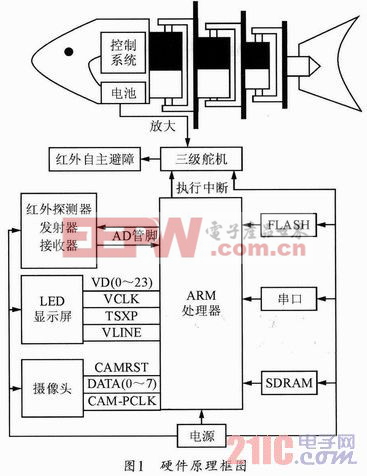
- 基于ARM自主避障机器鱼设计,摘要:研究设计了基于ARM芯片和LINUX嵌入式系统具有自主避障功能的机器鱼。首先搭建了基于ARM芯片的硬件平台,然后对图像采集、图像显示和红外测距进行实现。通过红外传感器实现机器鱼的自主避障的功能。实验表明基于
- 关键字:设计机器自主ARM基于

- 引言本文主要设计的是一辆自主识别道路的智能车。整个系统采用了16位单片机mc9s12dg128,模型车本身带有差速器和后轮驱动,需要设计完成基于单片机的自动控制系统使得模型车在封闭的跑道上自主循线运行。车模与控制器
- 关键字:道路智能识别自主光电传感器基于
- 标签:成熟CRM 自主开发CRM伴随着CRM客户关系管理理念在中国企业中的逐渐深入,国内出现大批开发CRM的软件应用商,同时,也有不少企业采取根据自身情况自主研发CRM系统。对于需要CRM的企业来说,究竟两者哪一个对企
- 关键字:CRM优势不同自主成熟开发

- 摘要:文章提出基于MMS的自主机房防火报警系统的总体设计。详细介绍了系统的架构、功能和关键技术实现。取得了较好的应用效果,对同类产品的设计与实现有一定的参考价值。
关键词:MMS;火灾报警;GPRS网络
0 引
- 关键字:报警系统设计实现防火主机MMS自主基于

- 摘要:介绍了用于对20 kg级便携式AUV的运行状态进行控制的软件设计以及实现。该软件是基于MFC对话框运行于Windows操作系统下的程序,使用了多线程编程技术和串口通信技术。串口操作线程用于向串口读取或写入数据,并
- 关键字:软件设计实现控制机器人自主水下20kg

- 地面机器人系统必须常常处理“枯燥、肮脏、危险”的工作。换言之,机器人系统通常用于人工介入成本过高、危险过大或者效率过低的任务。在许多情况下,机器人平台的自主工作能力是一项极为重要的特性,即通
- 关键字:自主工作机器人移动传感器促进惯性
- 摘要:多模块电源系统并联工作时,为了保证模块间电流应力和热应力的均匀分配,防止一个或多个电源模块运行在电流极限值,而采用并联均流控制技术,可以很好地满足需要。文中分析了LTC4350自主均流法的工作原理和性能
- 关键字:研究自主LTC4350
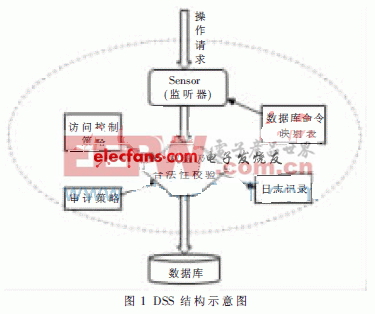
- 针对目前主流数据库的安全防护功能配置方式不灵活、不能应变需求的问题,在HOOK技术的基础上融入组态思想,设计并实现了一种适用于不同数据库的自主安全防护系统(DSS)。在SQLITE上的相关实验表明,利用DSS完全可以实现独立于特定数据库的自主安全防护,大大提高了数据安全防护的灵活性。
- 关键字:研究实现技术安全防护自主数据库
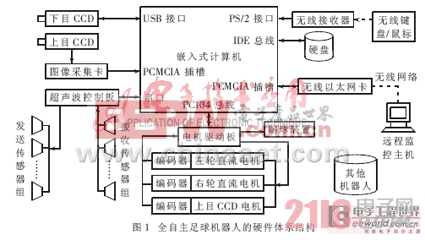
- 足球运动是一种大家非常喜爱的运动。让机器人去踢足球,听起来像天方夜谭似的。机器人也能去踢足球? 而且,还是要组成一个队伍,不同的机器人要互相配合?要知道,机器人要参加比赛必须要有自己的眼睛,自己的双腿,
- 关键字:设计实现体系结构机器人足球自主

- 摘要:为实现机器鱼比赛中鱼体的自主信号采集与处理、自动探测前方目标及实现水下自主避障等控制功能,文中设计了基于数字信号处理器TMS320DM355、水下摄像机KM-273CW以及SAA7111A增强型视频输入处理器等构成的可实现
- 关键字:机器设计控制自主TMS320DM355水下基于

- 摘要:该自主车辆地面自动辨识技术是以Leobot—Edu自主车辆作为试验载体,并应用DH—HV2003UC—T视觉传感器对常见的5种行车路面(石子路面、水泥路面、土壤路面、草地路面、砖地路面)进行图像信息的采
- 关键字:自动辨识技术研究地面车辆视觉传感器自主基于
- 摘 要: 以Philips公司的ARM单片机LPC2119为控制核心,提出了一种自主式移动机器人的设计方案。应用98C1051构成多超声传感器子系统控制电路,由此子系统实现对障碍物的测距及机器人的自主避障行走控制;通过光敏传感
- 关键字:机器人设计移动自主LPC2119基于
- 消费者对电池供电手持设备的小型化、低成本化以及通过接受多种输入电源来实现易用性的需求对系统设计工程师带来了诸多的挑战。利用PowerPath电池管理器系列可以有效解决这些挑战,它具有独立的自主操作特性,能够
- 关键字:电池充电过程锂离子简化自主电源管理利用电源
自主介绍
您好,目前还没有人创建词条自主!
欢迎您创建该词条,阐述对自主的理解,并与今后在此搜索自主的朋友们分享。
创建词条
关于我们-
广告服务-
企业会员服务-
网站地图-
联系我们-
征稿-
友情链接-
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473


