
基于模糊PID皮革收缩温度测定仪控制系统设计
一般情况下,在不同的偏差|e|和偏差变化率|ec|下,被控对象对PID控制器3个参数kP,kI,kD的自整定要求归纳如下:
(1)当|e|较大时,为使系统响应具有较好的快速跟踪性能,并避免因开始时偏差的瞬间变大,可能引起微分过饱和,而使控制作用超出许可范围,应取较大的kP和较小的kD。同时为避免系统响应出现较大的超调,需要对积分加以限制,通常取kI=0。
(2)当|e|为中等大小时,为使系统具有较小的超调,应取较小的kP,适当的kI和kD,以保证系统响应速度,其中kD的取值对系统的响应速度影响较大。
(3)当|e|较小时,为使系统具有良好的稳态性能,应取较大的kP和kI。同时为避免系统在设定值附近出现震荡,并考虑系统的抗干扰性能,当|ec|较小时,kD通常取为中等大小;当|ec|较大时,kD值可取小些。
1.3 参数模糊自整定PID控制器参数的模糊化
参数模糊自整定PID控制系统为双输入三输出的系统,模糊控制涉及的两个输入是偏差的绝对值|e|和偏差变化率的绝对值|ec|,输出量是PID控制器的3个参数kP,kI和kD。将|e|和|ec|的变化范围,根据皮革收缩温度测定仪温度控制系统的要求,定义为模糊集上的论域:|e|={0,1,2,3},|ec|={O,1,2,3);模糊集为|e|={Z,S,M,B),|ec|={Z,S,M,B}。它们分别代表零,小,中,大。隶属度函数如图2所示。本文引用地址://m.amcfsurvey.com/article/163736.htm

为了按皮革收缩温度测定仪温度控制系统的要求规则进行模糊推理,必须确定PID控制器参数的隶属度函数。定义它们的模糊论域为kP,kI,kD={O,1,2,3);模糊集为kP,kI,kD={z,s,M,B)。它们分别代表零,小,中,大。它们的隶属度函数如图3所示。

1.4 参数模糊自整定PID控制器模糊控制规则的建立
根据PID控制的基本原理,比例系数的kP作用在于加快系统的响应速度,提高系统的调节精度;积分系数kI的作用在于消除系统的稳态误差;微分系数kD的作用在于改善系统的动态特性。依据以上规则设计的模糊控制规则表如表1~表3所示。
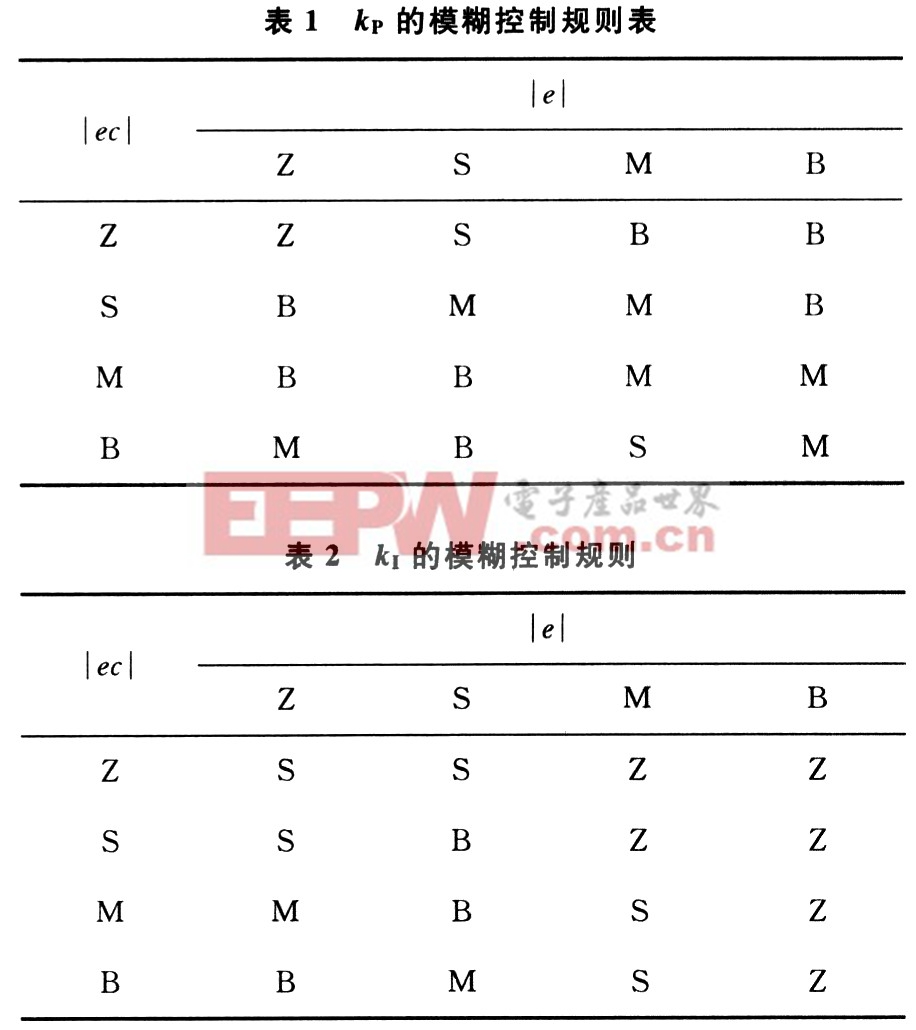

采用if A and B then C反映手动控制策略的控制规则,依据表1,设计16条模糊控制规则,形式如下:

1.5 参数模糊自整定PID控制器量化因子的选择及输出信息的解模糊化

















评论