
基于模糊PID皮革收缩温度测定仪控制系统设计
在对参数模糊自整定PID控制器输出信息模糊判决时,偏差的基本论域取为[-3,3]以及偏差所取的模糊集合的论域为[-n,…,0,…,n];偏差变化率的基本论域为[-ec,ec]以及误差所取的模糊集合的论域为[-n,…,0,…,n];其中e,ec表征误差大小的精确量,n是在0~e(0~ec)范围内连续变化的误差离散化后分成的档数(在实际控制系统中e≠n,ec≠n)。为进行模糊化处理,必须利用偏差量化因子ke和偏差变化率量化因子kec将输入量由基本论域转化到模糊集的论域,则偏差量化因子ke和偏差变化率量化因子kec计算公式:本文引用地址://m.amcfsurvey.com/article/163736.htm
![]()
在仪器中,由于皮革收缩温度测定仪的温度控制系统要求上升速率在0~3℃/min范围之内,为了达到要求,对不同的上升速率,偏差采用不同的量化因子。例如,当上升速率为2℃/min时,采样时间O.3 s;当上升速率为0.01℃/0.3 s时,e的基本论域取[-0.02,0.02],模糊集合的论域取n=2,e的量化因子ke=2/0.02=100,ec的基本论域取[-0.01,0.01],ec的量化因子kec=2/0.01=200。
在参数模糊自整定PID控制器原理图中,对建立的模糊控制规则要经过模糊推理才能决策出控制变量的一个模糊子集,它是一个模糊量而不能直接控制对象,还需要用合理的方法将模糊量转化为精确量(解模糊化),以便最好地发挥模糊推理结果的决策效果。在解模糊化时,采用重心法(式(4)),得到控制量“控制被控对象。
![]()
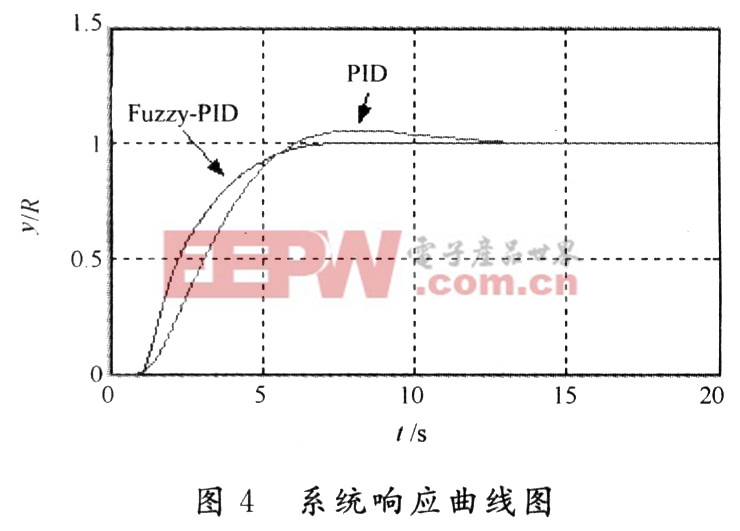
在Matlab的Simulink环境下,建立参数模糊自整定PID控制器和常规PID控制器的系统图进行系统仿真实验。参数模糊自整定PID控制器仿真曲线图和常规PID仿真曲线图如图4所示。通过系统响应曲线图,从系统的性能指标进行分析,参数模糊自整定PID控制器能有效地抑制了超调,同时也使皮革收缩温度测定仪温控系统实现无静差跟踪,其控制效果优于常规PID控制器的控制。
3 结 语
仿真结果表明,参数模糊自整定PID控制系统提高了皮革收缩温度测定仪温度控制系统的静态性能和动态性能,使温度控制系统具有较强的鲁棒性,自适应性,有效地解决了温度控制系统的温度漂移问题且具有较强的抗干扰性能。

















评论