
三大电机控制方案之MCU篇:英飞凌 XMC1000
航模控制器 - 高速无感BLDC控制
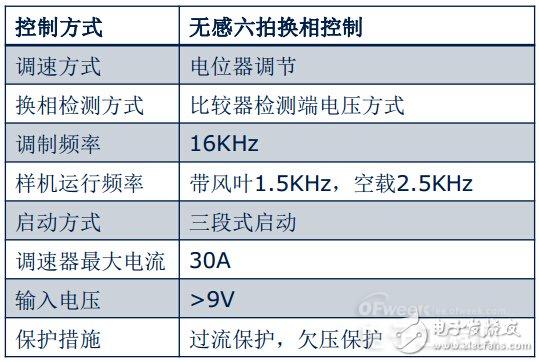
本文引用地址://m.amcfsurvey.com/article/201605/291245.htm航模BLDC特点:体积小,重量轻,转速高(几千K/V或更高),业内最高速度(21,0000RPM/1对极),无Hall传感器,减少线材,避免潜在故障点,宽电压范围工作(电池供电)。
对MCU的要求:最好内置比较器实现过零点检出,尽量硬件实现换相检测,减少CPU占用,端电压分压后不滤波直接处理,避免RC延时的影响。
XMC1300航模控制器Demo介绍
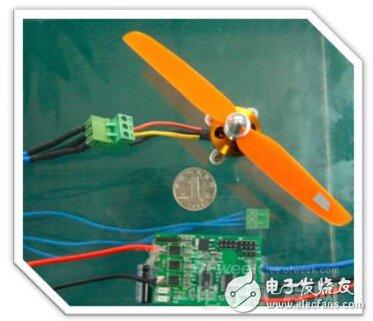
实物图

结构框图
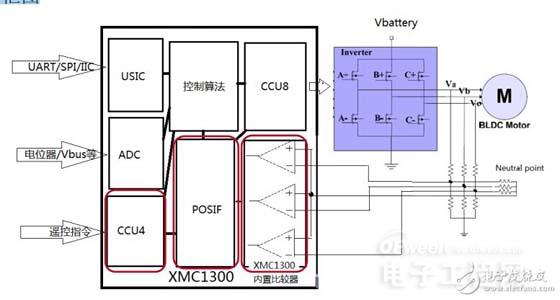
-内置三个高速比较器,无须输入信号切换
-POSIF单元处理比较器信号,实现硬件换相
-CCU4配合POSIF实现滤除开关毛刺和续流尖峰处理、换相延时。










评论