
一文看懂无人驾驶:你想知道的都在这
固态激光雷达能够通过电子部件进行相控阵扫描,并不需要依靠内部机械部件的旋转,这样不仅能把激光雷达越做越小,也控制住了成本。目前全固态激光雷达的主要研发厂商有Quanergy、以色列的Innoviz以及TetraVue等企业,但均未实现量产,Quanergy宣布其纯固态激光雷达已经在进行测试,如果顺利的话2018年初可实现量产。
本文引用地址://m.amcfsurvey.com/article/201703/345985.htm而前不久接受了百度与福特投资,目前是机械旋转式激光雷达最大企业的Velodyne,仅开发出“混合固态激光雷达”,而这一产品还是要靠内部的机械部件实现360°的高速旋转,仅仅实现了产品的小型化,算是过渡产品。国内企业镭神智能、禾赛科技及北科天绘也推出了内部旋转式的混合固态激光雷达产品。
传统雷达与摄像头:
由于激光雷达的高昂价格,走实用性技术路线的特斯拉便采取了更加切合实际的路线发展其“辅助驾驶”功能,其采用的硬件便是传统的雷达和单目摄像头。这一设备其硬件原理与目前车载的ACC自适应巡航系统类似,依靠覆盖汽车周围360°视角的摄像头及前置雷达来识别三维空间信息,从而确保交通工具之间不会互相碰撞。
具体来说,单目摄像头先通过图像匹配进行目标识别,再通过目标在图像中的大小去估算目标距离,准确识别是准确估算距离的第一步。因此单目识别技术需要建立并不断维护庞大的样本特征数据库,如果缺乏待识别目标的特征数据,就会导致系统无法识别以及测距,很容易导致事故的发生。
目前基于单目摄像头的半自动驾驶系统还远未成熟,此前特斯拉导致驾驶员死亡的事故便是因为其单目摄像头误将掉头的白色集装箱货车错误的识别为了空中的白云而未能及时刹车。

双目摄像头的测距方式则是通过对图像视差进行计算,直接对前方景物进行距离测量。双目摄像头的原理与人眼相似,难点在于计算量大,对计算单元的性能要求非常高,这使得双目系统的产品化、小型化的难度较大。因此目前宝马i3、特斯拉以及日产ProPilot等自动驾驶技术均采用了单目摄像头设备。
星河研究院预计,短期内基于双目摄像头的算法与处理器将会得到较快的发展与自动驾驶汽车产业的青睐,但其低解析度、相对激光雷达准确性较低的特点在面对未来成本不断降低的激光雷达的竞争中很大概率要败下阵来,因此不出意外的话实现第五级别的全自动驾驶功能很大概率还是要建立在激光雷达技术之上。
2.V2Xvs 红绿灯
V2X是一个能够让车辆与周围的移动交通控制系统通信的技术,V2V技术则允许车辆与其他车辆互相通信。这是未来全自动驾驶汽车所依赖的一项技术,但遗憾的是相比于火热的传感器领域,V2X技术的研发创新还很冷清。
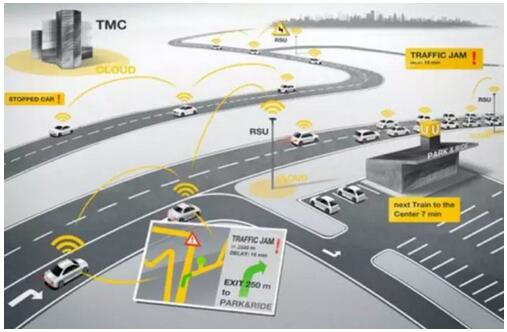
通过 V2X 技术,道路上的汽车彼此间可以通过开放频段交换数据,具备了与其他汽车和路边基础设备分享实时驾驶信息以及生成预测路况信息的能力。





评论