
基于51单片机的电动车跷跷板设计
2.3 电动机及其驱动模块的选择
根据题目中小车行驶全程的时间要求,可知小车的行驶速度很慢,普通的电机很难满足此速度要求,而直流减速电机可以满足此要求,且具有很大的转动力矩,不会在倾斜面出现堵转情况。故我们采用直流减速电机。
在选用驱动模块方面有以下两种方案:一是采用专用驱动芯片。该芯片集成度高,占用空间小,主要应用于电机调速场合,但价格较高。二是采用晶体三极管驱动电路。由于电动车所要求的功能比较简单,用晶体三极管驱动就可以了,故我们最后决定用第二种方案。
2.4 信息显示模块
若采用LED,缺点是占用单片机接口太多,显示信息量少,需要循环显示,占用太多程序资源。而采用LCD,只占用单片机6条I/O线,同时显示信息量大,灵活多变显示多种信息。因此,我们拟采用后者。
2.5 电源选择
方案一:所有器件采用单一电源(5节五号电池)。这样供电比较简单,但是由于电动机启动瞬间电流很大,会造成电压不稳、有毛刺等干扰,严重时可能会造成单片机系统掉电,使之不能完成预定行程。
方案二:双电源供电。电动机驱动电源采用5节5号电池(大容量2.3Ah电池),单片机及其外围电路电源采用另一组3节5号电池(大容量2.3Ah电池)供电,两路电源完全分开,这样做虽然不如单电源方便灵活,但可以将电动机驱动所造成的干扰彻底消除,提高了系统稳定性。
我们认为本设计的稳定可靠性更为重要,故拟采用方案二。
经过一番仔细的论证比较,我们最终确定的电动车跷跷板系统框图如图4所示。

图4电动车跷跷板系统框图
3.系统分立模块设计及工作原理
3.1寻迹线探测电路
采用型号为E3F-DS30C4集成断续式光电开关探测器,该探头输出端只有三根线(电源线、地线、信号线),只要将信号线接在单片机的I/O口,然后不停地对该I/O口进行扫描检测,当其为高电平时则检测到白纸,当为低电平时则检测到黑线区域。小车前进(倒退)时,始终保持黑线在车头(车尾)两个传感器之间,当小车偏离黑线时,探测器一旦探测到有黑线,单片机就会按照预先编定的程序发送指令给小车的控制系统,控制系统再对小车路径予以纠正。当小车回到了轨道上时,车头(车尾)两个探测器都只检测到白纸,则小车继续直线行走,否则小车会持续进行方向调整操作,直到小车恢复正常。
3.2平衡状态检测电路
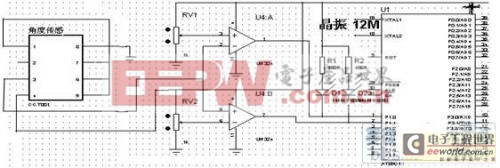
图5 分压比较式平衡检测电路
在平衡检测电路中,我们运用了高精度角度传感器,此传感器通过对自身偏离水平角度的测量,对应线性输出一定范围内的电压值。依据题目的要求,我们分析得出小车随跷跷板上下摆动幅度在正负4度角时即认为其处于平衡状态。而此角度传感器在此区间内的灵敏度最高,其输出电压为2.45-2.55伏之间。将此输出电压经比较放大,然后通过A/D转换器转换成数字量通入到单片机中。但是由于整个变化范围只有0.1度角,任何轻微的干扰都会使测量结果产生严重的偏差。用A/D转换又会使精度降低,干扰过大,又因为现实中很难做到真正的静态平衡,所以我们最终决定采用动态寻找平衡的方式,因此用分压电路和电压比较器制作信号电路,根据信号端的变化控制小车,使角度传感器的电压输出保持在2.45-2.55伏之间,经多次测试与精心调试,该电路可很好的满足要求。平衡检测电路如图5所示。
3.3 电动机驱动电路
电动机驱动电路如图6所示。该驱动电路中的J1接电机,MOT1和MOT2接高低电平来控制电机的正反转,进而控制电机的前进和后退以及左右转向。
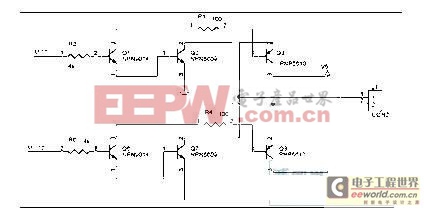
图6 电动机驱动电路
4. 软件设计
软件结构如图7所示。(详细软件流程图见附录)








评论