
三轴台式工业机器人通用控制软件设计
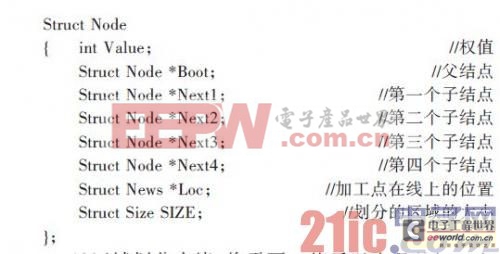
一旦区域划分完毕,将需要一值予以表示其加工点的位置。采用结构体的形式予以表示,包括X,Y,Z三个坐标,表示其相对于所在结点空间的坐标。该结构体属于环境单位结点的一部分,具体代码如下:
Struct News
{int x;int y;int z;};
每一个环境单位结点都拥有自己的一个ID号,即该环境单位的大小及位置,具体代码如下:
Struct Size
{int y;int z;int x;int Size;};
x,y,z分别是区域空间内该坐标轴上的最小值,Size表示该立方体区域的边长。
4.2权值寻找
在路径规划上,采用权值寻找法。对每一个环境节点都进行一个权值的赋予,给予结点不同的优先级,权值越低,优先级越高,用于在路径寻找中找到最优路径。
例如,现有4个子节点A,B,C,D,给予A结点的权值为100,B结点的权值为80,C结点的权值为50,D结点的权值为10.现在在路径规划寻找最优路径时,直接先寻找到D结点,然后继续寻找下去,若出现多个优先级相同的结点时,则分而寻之,到寻找完毕之后,再进行最优路径选取,可采用权值之和最小者优先的方法等[6].权值赋予的优先级按由高到低的顺序排列为:存在加工点,靠近加工点,加工工件非加工点部分,其他区域。









评论