
一种基于CAN总线的监控系统设计及位定时分析
位周期参数确定
在初始化can控制器的时候,要考虑配置总线时序寄存器的配置等重要问题。事实上,can通信协议中规定、通信波特率、位周期的取样点以及取样个数均可以自主设定,这样为用户在网络通讯性能的优化上提供了空间。如果位周期采样点偏后,可以接受较大的信号传输延迟,相应总线的传输距离可以延长;如果周期的取样点接近中间,则可以容忍系统节点间的参考时钟误差。这些矛盾直接影响了网络系统性能,所以总线位定时非常重要,合理的位定时可以提高系统的整体性能。
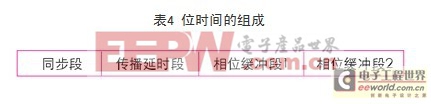
can 总线周期由4个部分组成: 同步段(sync_seg) 、传播延时段、相位缓冲段1 ( phase_seg1) 和相位缓冲段2 (phase_ seg2) ,如表4所示。
同步机制
can是有效支持分布式实时控制的串行通讯网络。从位定时的同步方式考虑,它实质上属于异步通讯协议,每传输一帧,以帧起始位开始,而以帧结束及随后的间歇场结束。这就要求收/发双方从帧起始位开始必须保持帧内信息代码中的每一位严格的同步。从位定时编码考虑,它采用的是非归零编码方式,位流传输不像差分码那样可以直接用电平的变化来代表同步信号,它属于自同步方式(接收端设法从收到的信号中提取同步信息的方式),can节点从一个位值到另一个位值的转变中提取时钟信息。为保证同步质量,can协议定义了自己的位同步方式:硬同步和重同步。
通过同步机制,可以消除由于相位误差带来的影响,保证信息正确解码。硬同步后,内部的位时间从同步段重新开始。因此,硬同步强迫同步沿处于重新开始的位时间同步段之内。重新同步的结果使相位缓冲段1增长,或使相位缓冲段2缩短。相位缓冲段加长或缩短的数量有上限,此上限由重新同步跳转宽度给定。
一个沿的相位误差由相关同步段的沿的位置给出。相位误差定义如下:
le = 0如果沿处于同步段里;
le 》 0 如果沿处于采集点之前;
le 《 0 如果沿处于前一个位的采集点之后。
当引起重新同步沿的相位误差的幅值小于或者等于重新同步跳转宽度的设定值时,重新同步和硬同步的作用相同。当相位错误的量级大于重新同步跳转宽度时有2种情况:
如果相位误差为正,则相位缓冲段1被增长,增长的范围与重新同步跳转宽度相同;
如果相位误差为负,则相位缓冲段2被缩短,缩短的范围与重新同步跳转宽度相同。
硬同步和重新同步是同步的2种形式,遵循以下规则:
在一个位时间里只允许一个同步;
仅当采集点之前探测到的值与紧跟沿之后的总线值不相符合时,才把沿用作于同步;
总线空闲期间,有一“隐性”转变到“显性”的沿,无论何时,硬同步都会被执行。












评论