
DIY一款具运动状态追踪功能的遥控玩具,做守护天使
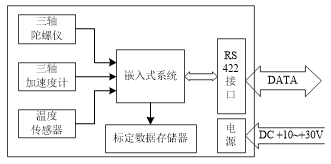
3.1.3飞机硬件模块
守护者飞机作为系统的执行机构,不仅要求具有较好的机械性能,小尺寸、轻重量等要求;在运动性能的控制上,也具有较高的精度和实时性。
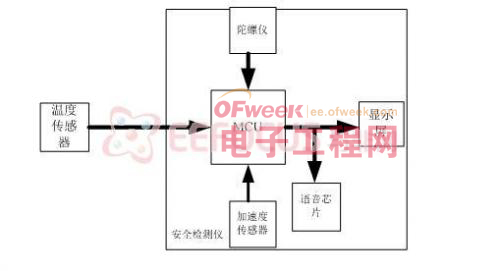
飞机设计有四个模块:信号接收模块、存储器与中央处理控制模块、飞机执行模块、信息探测模块。
(1)信号接收模块:
接收装置依据ZigBee通信协议将接收儿童身上的运动信息即传感器信号传给存储器。
(2)传感器信号处理:
中央处理器从存储器中读取数据,通过算法分析计算初始儿童 X、Y 轴的加速度和转角,并算出飞机需要的转速,输出对应脉宽的脉冲控制飞机飞行,随时接收飞机的反馈信号做出相应的处理。选用基于ARM的低功耗高性能32位微控制器STM32F103RE来实现。
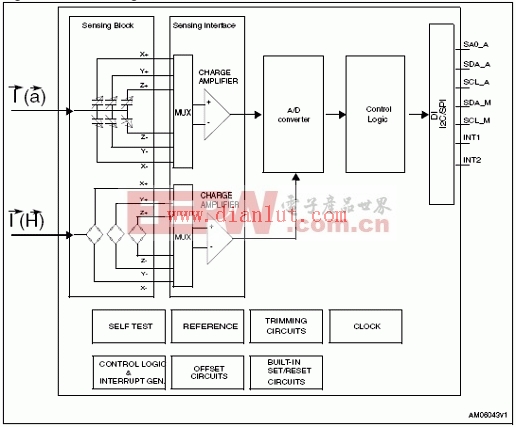
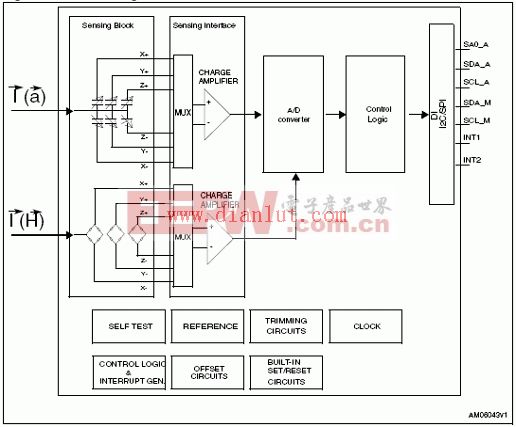
(3)信息探测模块:
地磁传感器检测儿童活动范围是否超出设定阈值
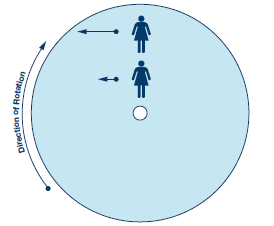
执行过程大体可以分为预测、观测和更新三个阶段。首先将儿童的位置存储在一个独立的状态向量中, 然后通过先预测再观测的迭代递推过程来估计系统状态,实现对儿童的定位和距离被观测点的位置的计算。 执行过程的各阶段可以描述为:
(a) 预测阶段,初始化得到飞机位置和遥控器的相对初始位移;
(b) 观测阶段,当飞机运动时,利用飞机自身携带的传感器识别当前位置的特征,即偏离特
征,获得遥控器与飞机之间的相对位置,建立量测方程,根据载体预测位置和特征点位置计
算两者的相对位置关系;
(c) 更新阶段,利用观测信息进行滤波更新,同步更飞机位置和遥控器的位置。
故选用LSM303DLH数字罗盘可以方便快捷的实现所需功能。
温度和压强测量儿童所在的环境信息
选用LPS001DL压力传感器测量环境压强、选用STLM75温度传感器,测量环境温度



.jpg)


评论