
逐次逼近型(SAR)模数转换器在马达控制中的应用

摘要:在马达控制系统中,设计者可以从看起来不协调的组件中得到良好的性能。假设系统电流传感器的输出为±5V信号、需要使用双电源(±12V)的模数转换器(A/D)。现在已经有一种新的A/D可以拥有同样的效能且价格并不昂贵。
本文引用地址://m.amcfsurvey.com/article/119959.htm简介:
在一个典型的马达控制系统中(图1),马达相位线圈的电流和电压经由微控制器(μC)或是数字讯号处理器(DSP)来测量和转换成数字信号。由于有高电压在马达相位线圈上,隔离的霍尔型(Hall effect)闭环传感器将马达的场信号转换成在A/D的输入范围内的电压信号。多通道SARA/D转换器被用来做同步取样以得到正确相位信号。这份报告将分析闭环电流传感器及如何从A/D转换器实现最佳的信燥比。在此,我们用ADS7864,6通道、12位、500KSPS逐次逼近型型的A/D转换器。

霍尔型闭环电流传感器:
一个开环的电流传感器输出一个放大的霍尔传感型的电压VH。VH是与通过这个装置的基准电流、磁通量及取决过程参数和温度的矢量因素成正比(图2)。
这个闭环传感器也可称为补偿型或零磁通量型传感器,它集成了补偿电路使它的整体性能优于未补偿的霍尔传感器。输出是马达电流的感应电流再经由取样电阻感应输出。
在这传感器中,霍尔电压VH直接作用于跨导型放大器中。放大器的输出电流被送至绕组线圈中,而感应出与马达电流相反的磁场。放大器的高开环增益迫使霍尔传感器的电压变小,如此,通过霍尔传感器的磁场也会变得非常小。我们可由马达线圈来计算磁通量(Bp= NP·IP)。磁场是反馈信号,是由磁场传感器的输出电流乘上次级线圈匝数(BS= IS·NS)而得。次级的电流IS会依匝数比而减少且远小于IP是因为NS的匝数是被用来产生相同的磁通量(安匝)。因此
NP·IP= NS·IS(1)
放大器的高开环增益可用方程式(1)来近似表示。BS感应出等效的BP以及它们的安匝数来彼此平衡,因此该系统可在近乎零磁通量下操作。
以一个测量100A的直流电流为例: NP=1,NS=1000,所以匝数比是1:1000。一旦IP为一个正,BP就会在霍尔组件中产生VH电压,这个电压被转换成电流再经由放大器产生了IS后再流到次级的绕线中。BS就这样产生且也补偿了BP。而次级的电流为:

因此, IS与IP呈正比,这个电流也就是使用者所要的。以下的分析将霍尔器件用理想的电流源来取代。
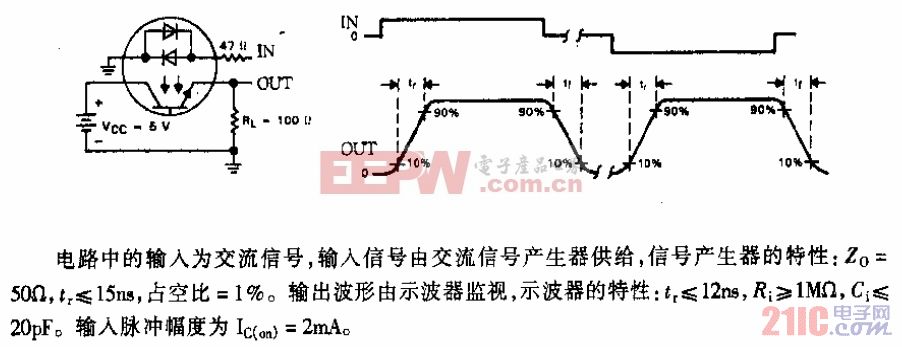
具有霍尔传感器的输出信号(负载电阻)
输出电流通过分流电阻产生输出电压,该电阻值的范围须在霍尔传感器的规格内,也就是在电阻RMmin(是由功率消耗来决定)及RMmax之间. 而RMmax的取值须避免电路中的电子饱和并考虑到最小供电电压下的最大量程。
要注意到一点那就是在规格书中指出RM值是与额定值及测量范围相对应的关系,其它的条件也可以决定取样电阻RM的选择。
在我们的例子中,LEM LA 55-P的闭环转换器的参数:Ip= 70 A,TA= 70℃,及VC= ±15V,利用匝数比1:1000可以决定次级电流IS = 70 mA。
在LEM LA 55-P的规格数据中指出RMmax= 71Ω、RMmin=50Ω,为了要使输出电压能在±5V的范围内,故使用71Ω的电阻来当取样电阻,图3显示出了IP与取样电阻上电压的关系。


霍尔传感器相关文章:霍尔传感器工作原理
霍尔传感器相关文章:霍尔传感器原理








评论