
基于变系数滑模观测器的PMSM伺服系统

DSP采样得到的电流实时波形如图3,4a所示。本文引用地址://m.amcfsurvey.com/article/175869.htm
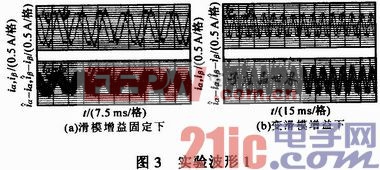
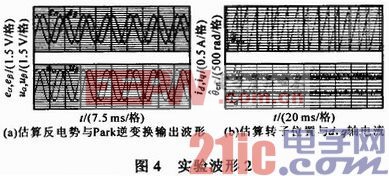
图3a上半部分是在滑模增益固定不变时,经Clark变换后的电流波形,下半部分是电流误差开关信号。可见,经Clark变换后的电流虽很小,但估算的电流含有高频的开关信号,电流存在较大干扰。为进一步消除噪声干扰,采用滑模增益,根据电流的峰值变化的方法选择合适的滑模增益,同时适当修改滤波器系数,所得实验波形如图3b所示。图中上半部分是经Clark变换后的电流波形,下半部分则是电流误差开关信号即对变换后的电流进行估算所得到的波形。可见,估算电流波形所含噪声大大减少,电流波形互错90°且波形接近Clark变换后的电流波形。
图4示出估算反电势与Park逆变换后输出波形、估算转子位置及d,q轴电流波形。
图4a上半部分为对电流误差信号进行滤波得到的估算反电势波形,下半部分则为经过Park逆变换输出的uαuβ。图4b上半部分为估算的转子位置波形,下半部分为得到的id和iq波形。可见,经过合理设计滤波器,得到的转子位置信号比较光滑,纹波小;而由此得到的id和iq为常量。
5 结论
针对PMSM的无位置传感器的伺服系统,提出了一种基于变系数滑模观测器的控制方案,采用协调低通滤波器参数和滑模观测器系数的方法来抑制滑模观测器固有的抖动问题。最后,通过实验验证了方案的正确性和可行性。整个方案简单、易于数字化实现,具有广阔的工程应用前景。














评论