摘要:文章主要描述仿生机器蛇的设计,包括机器蛇的结构设计和运动规划连贯动作的实现。通过对蛇形机器人在有障碍物和无障碍物环境中,进行不同连贯动作的运动规划和运动形式变化,找出机器人设计的不同侧重点;最后,
关键字:蛇形机器人 仿生 运动规划
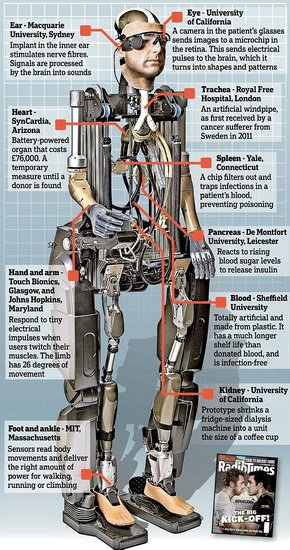
据英国每日邮报报道,目前,科学家花费100万美元打造一个真实的仿生机械人,它是由假肢和人造器官构成的。它被称为“雷克斯(Rex)”,是机械外骨骼仿生人的意思,身高可达到2米,是由从世界各地研制的人造肢体和器官构成。近年来,科学家在先进假肢和人造器官领域的突破性发展,意味着很快不仅能够置换失去的身体器官,还能进一步增强其功能性。 科学家建造的这个仿生机械人“雷克斯”,是由来自世界各地研制成功的人造肢体和器官构成 英国第4频道节目主持人贝
关键字:仿生 机器人
我们知道,人类所有的灵感都是大自然的馈赠,开发最新技术的灵感来自大自然:为能更快地为锂离子电池的多孔电极灌注液体电解质,德国卡尔斯鲁尔技术研究院(KIT)的科学家利用一种与树木传输水分相仿的物理化学效应,开
关键字:分析 技术 仿生 电池 锂离子
这是一个简单到令人发指的仿生避障机器人,仅由电池、开关、马达组成最基础的电学电路,就能表现出类似自然界生物的智能!在遇到障碍物时会掉头,看起来有 点象一只疯狂的小强。只要有基本的物理电学基础就可以自
关键字:机器人 制作 仿生 电路 电学 基础
DSP实现仿生机器蟹多关节控制系统,仿生机器蟹控制系统需要较高的控制精度和运算速度,以便在机械结构刚度较高的情况下,通过提高响应速度来确保机器人的正常行走和姿态控制。由于在机器蟹腿节和胫节置有两个电机(如图1所示),使其质量较大,同时由
关键字:关节 控制系统 机器 仿生 实现 DSP
以仿生机器鱼实验平台为载体,介绍基于 PIC18F452单片机的舵机控制方法。主要围绕舵机的角度控制和速度控制进行了深入浅出的介绍,并给出了相应的程序实例。
关键字:机器 控制 仿生 单片机 PIC 基于 收发器
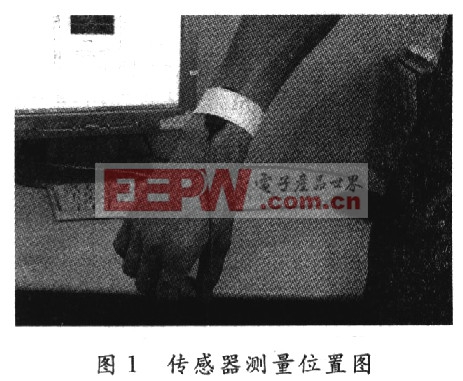
假肢研究的重点是生理信号的提取和对仿生假手的控制。将肌音信号作为假肢控制的生理信号源,现以放大电路和滤波电路为核心,实现了能采集肌音信号的电路系统设计。通过采集软件,将数据导入Matlab进行特征分析,讨论并验证了电路的全部功能,运用该电路采集到了符合要求的肌音信号。该设计是一种实用的肌音信号前端采集电路。
关键字:信号 设计 系统 仿生 基于 采集 功率模块
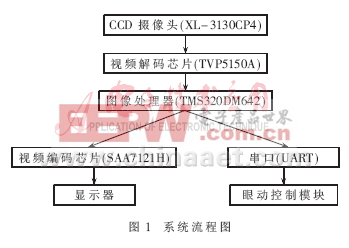
基于TI TM320DM642的仿生眼视觉图像处理系统,为研制仿生眼球,构建了一个嵌入式的基于仿生控制的视觉图像处理系统。根据仿生眼对视觉系统的要求,设计了一个以TMS320DM642 DSP为核心,以TVP5150、SAA7121H为编解码模块的视觉图像处理系统;实现了仿生眼视觉识别的一系列软件开发,包括实时图像采集、视频图像处理、视频输出及目标位置参数传递等功能;在CCS2.2的环境下,对视觉识别算法进行了探索,用经典的Prewitt算法以及改进的Prewitt算法对系统进行实验测试。
关键字:图像 处理 理系 视觉 仿生 TI TM320DM642 基于 数字信号
英国曼彻斯特的彼得·莱恩先生首次看到了物体的轮廓并能阅读文字,这要多亏了一种全新的“仿生眼”设备。目前这种设备正在全球小范围内试用,一旦推广,有望为更多因遗传病致盲的患者带来光明。这种先进的“仿生眼”主要针对因视网膜色素变性而致盲的患者。视网膜色素变性是一种常见的与遗传相关的致盲性眼病,表现为渐进式周边视野缺损和夜间视力模糊,最终失明。 “仿生眼”设备主要包括一副装有摄像头和信号传送器的眼镜、一个视频处理器、一
关键字:医疗电子 仿生 电子仿生眼
波动仿生推进器是一种依据鱼类仿生学原理设计的新型水下推进器。控制器局域网(Controller Area Network,即CAN总线)是一种能有效地支持具有很高安全等级的分布实时控制的串行通信协议。基于波动仿生推进器内部环境及多电机独立控制结构的特点,采用CAN总线来构建波动仿生推进器内部的通信网络。文章对CAN总线在波动仿生推进器上的应用方案进行了系统阐述,提出了具体的软硬件解决方案,并对其中的一些关键点进行了说明。此外,对波动仿生推进器的波动控制技术,即多电机的协调控制方法也作了相应论述。
关键字:CAN 总线 波动 仿生
仿生机器蟹控制系统需要较高的控制精度和运算速度,以便在机械结构刚度较高的情况下,通过提高响应速度来确保机器人的正常行走和姿态控制。由于在机器蟹腿节和胫节置有两个电机(如图1所示),使其质量较大,同时由于体积的限制使得各步行足相互间距较小,因此将造成机器蟹在行走过程中耦合较强,控制模型受躯体位姿、步行足位形和步态等因素的影响较大。这就要求控制系统控制结构灵活,具有调整步行足轨迹和步态的能力,并能适应控制模型的变化。因此必须研制一种具有强大运算处理能力、软硬件结构模块化的机器蟹控制系统。 从作业
关键字:机器人 仿生 机器蟹 伺服控制器
仿生介绍
您好,目前还没有人创建词条仿生!
欢迎您创建该词条,阐述对仿生的理解,并与今后在此搜索仿生的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司
京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473