- 为了在未来战争中占据信息优势,能够在隐蔽的环境下进行军事侦查,为此设计了一种军事侦察机器人仿生蛇。该仿生蛇以STM32微控制器为主控核心,以蛇体搭载各种传感器,使用舵机旋转带动身躯移动作为主要推进机构,在各种复杂的战场环境中具备隐匿前行、实时侦查及时发现目标并将通过WIFI图传模块将侦察信息迅速传回的功能。蛇形机器人体型小,重心位置很低,运动方式灵活多变,复杂环境适应能力很好,具有良好的稳定性等优点,非常适于[1]隐蔽侦察。
- 关键字:202307实时侦察蛇形机器人隐匿侦察
- 摘要:文章主要描述仿生机器蛇的设计,包括机器蛇的结构设计和运动规划连贯动作的实现。通过对蛇形机器人在有障碍物和无障碍物环境中,进行不同连贯动作的运动规划和运动形式变化,找出机器人设计的不同侧重点;最后,
- 关键字:蛇形机器人仿生运动规划
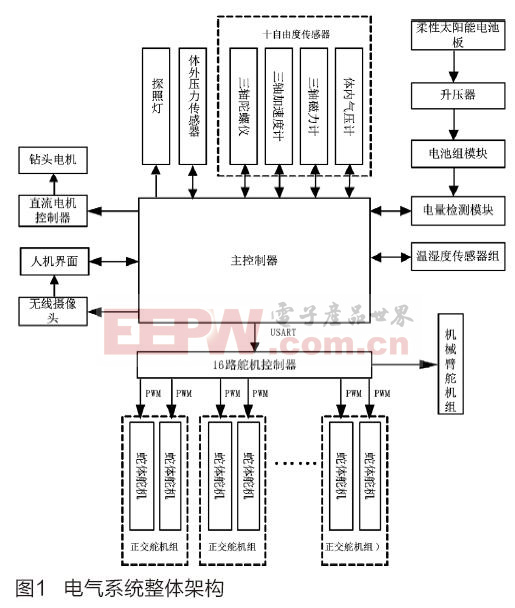
- 本文设计了一种可闭环控制的多功能水中蛇形机器人,主要解决现有无人潜水器不能进行运动姿态调整、续航能力低且功能较为单一的问题。蛇体内部装有的三轴加速度计、三轴陀螺仪、三轴磁力计可用于实时采集蛇形机器人运动时的加速度大小和方向、转向时的角速度和所处的方位,通过Kalman滤波算法对这九轴数据进行融合,可以得出机器人在行进时较为准确的航向角运动检测和定位功能;蛇体外表面覆盖有柔性太阳能电池板,可在电池电量不足时浮出水面进行充电;蛇体前端的可伸缩式机械臂、旋转钻头和探照灯,可用于水中作业;蛇体内的无线摄像头及多种
- 关键字:蛇形机器人人机界面水中作业十自由度传感器太阳能充电201510
蛇形机器人介绍
您好,目前还没有人创建词条蛇形机器人!
欢迎您创建该词条,阐述对蛇形机器人的理解,并与今后在此搜索蛇形机器人的朋友们分享。
创建词条
关于我们-
广告服务-
企业会员服务-
网站地图-
联系我们-
征稿-
友情链接-
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473
