
液压位置伺服系统的模糊PID控制研究
1. 引言
本文引用地址://m.amcfsurvey.com/article/163451.htm当今,在工业、国防等自动化领域,液压伺服系统以其重量轻、体积小、产生力矩大等优点而得到广泛应用。但由于漏油、油液污染等因素影响,液压伺服系统中普遍存在参数时变、非线性尤其是阀控动力机构流量非线性等现象。随着对控制精度要求的提高,对液压伺服控制技术也提出了越来越高的要求。传统PID控制很难达到满意的控制效果,针对这一问题,近年来出现了许多不同的现代控制策略,如神经网络控制、自适应控制、模糊控制、预测控制等。这些控制方法在理论上取得很大进步,但是在液压伺服控制中还有一些实际问题需要解决[1]。
模糊控制不需要被控对象的精确数学模型,并且可以引入专家经验,因此有较好的实用性。但单独使用模糊控制不易消除稳态误差,且对控制器运算性能要求较高[2],而PID算法简单又可以较好的消除稳态误差。对此,本文采用模糊控制与PID控制结合,利用模糊控制实时修正PID参数,提高了系统的控制精度和鲁棒性,有较好的实用性。
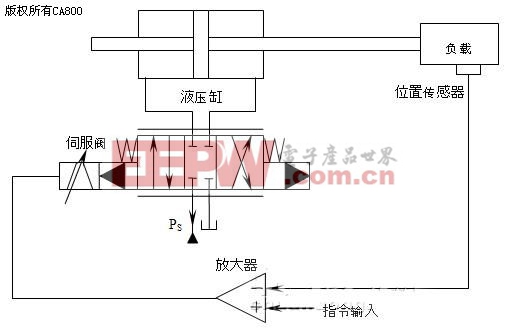
如图1所示,该液压位置伺服系统由放大器、电液伺服阀、液压缸、负载以及位置传感器等组成。输入信号经放大后送入电液伺服阀,小功率电信号经由伺服阀转化为阀芯位移信号,然后转换成流量和压力等液压信号,这些信号最后驱动液压缸带动负载完成指定动作。
因电液伺服阀实现了电液信号的转换和液压功率放大两个功能,故电液伺服阀在伺服系统中起桥梁的作用,是系统的心脏,本文中位置伺服系统采用动铁力矩马达喷嘴挡板式两级电液伺服阀。
根据力矩马达的电压、磁路和运动方程,喷嘴挡板位移与马达的偏角关系以及主阀 (对称四通滑阀)的运动方程和流量方程[3],可以推导出电液伺服阀传递函数如下:
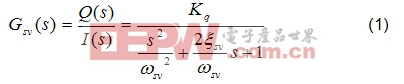
式中: ωsv为伺服阀固有频率; ξsv为阻尼比; Kq为伺服阀流量增益,应按实际供油压力下的实际空载流量确定,即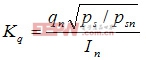 , qn为伺服阀的额定流量, ps为实际供油压力,psn为伺服阀规定阀压降,一般psn=7MPa,In为伺服阀额定电流。
, qn为伺服阀的额定流量, ps为实际供油压力,psn为伺服阀规定阀压降,一般psn=7MPa,In为伺服阀额定电流。
此外,本文中执行器为液压缸,且负载为纯惯量,不考虑机架刚度等因素,由运动方程可以推导出阀控缸传递函数为:
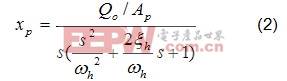
式中:Q0为伺服阀空载流量, ,符号含义与前面相同; P为液压缸活塞有效面积; ωh为液压固有频率;ξh为液压阻尼比;
,符号含义与前面相同; P为液压缸活塞有效面积; ωh为液压固有频率;ξh为液压阻尼比;
通过上述推导得到液压位置伺服控制系统中液压被控部分的数学模型(1)(2),然后在使用PID控制的基础上经过模糊控制修正PID的比例、积分和微分三个参数,这样就可以保证系统在不同状况下都处于最优状态,从而提高了系统控制精度、有较好的实时性与鲁棒性。如图2所示为设计的液压位置伺服模糊 PID控制系统方框图。
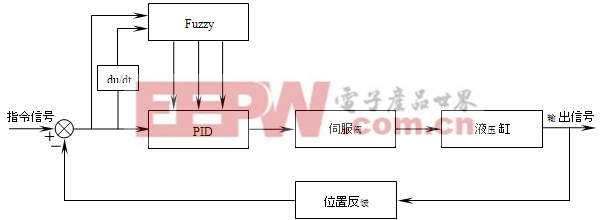
图2 液压位置伺服模糊PID控制系统

pid控制器相关文章:pid控制器原理


















评论