
多传感器模糊—概率交互作用的数据关联算法

最后,由重心去模糊算法得出关联度
![]()
其中![]() j是μBj(Z)达最大值的点.
j是μBj(Z)达最大值的点.
模糊系统的学习算法有多种[6],但它们都是基于半模糊模型,即前提的模糊隶属函数为单值.单值模糊产生方法不适合含有噪声的情况.作者在文献[5]中采用了一种基于最陡下降法的全模糊模型学习算法,可用于受噪声影响的模糊关联系统的学习.
五、仿真举例
1.航迹模型
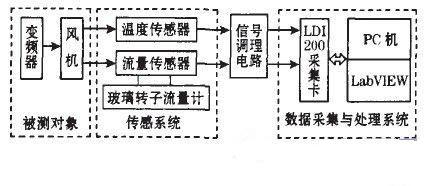
该机动目标的航迹由三个不同的运动段组成.第一段为匀速运动段,沿X轴方向,起始于点x=0,y=5km,vx=0.5km/s,vy=0,持续1~50秒.第二阶段为加速转弯段,加速度为ay=5g,ax=0,持续51~70秒.第三阶段为匀速运动段,沿Y轴方向,vy=0.5km/s,vx=0,持续71~100秒.假设每个采样点上,有效杂波回波数为2个.采样间隔T=1s.
2.性能检验与比较
首先,考虑用PDAF和多模型方法共同作用的情况.图1给出了所得到的跟踪结果.可见,当机动发生时,由于密集杂波的干扰,造成关联错误,导致目标丢失.图2,3分别给出了上述情况时,各有效回波源于目标的概率.可见,当机动发生时,真实目标回波的概率趋于零.而杂波的概率却趋于1.
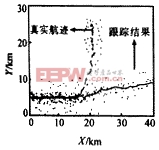
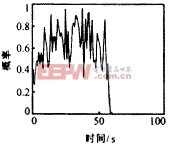
图1 用PDAF得出的跟踪结果 |
图2 真实目标回波的关联概率 |
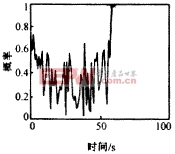
图3 杂波回波的关联概率 其次,考虑用本文提出的模糊逻辑和概率交互作用的数据关联方法与多模型方法共同作用的情况.经Monte Carlo仿真,得如下结果.图4给出了跟踪结果.可见,较好地实现了对该机动目标的跟踪.图5,6分别给出了上述情况时,各有效回波的加权系数.可见,真实目标回波的加权系数明显大于杂波的权系数.最后,考虑分别使用多传感器和单传感器时,目标状态估计精度上的差异.图7给出了上述两种情况时的目标位置估计的均方误差.可见,多传感器的估计精度明显好于单传感器时的估计精度,尤其是在机动发生处. |
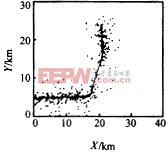
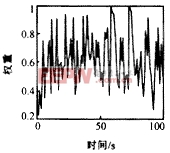
图4 用本文算法得出的跟踪结果 |
图5 真实目标回波的加权系数 |
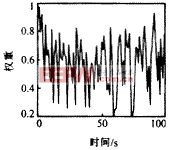
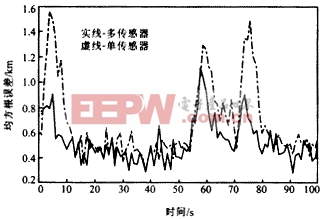
图6 杂波回波的加权系数 |

相关推荐
技术专区 |


评论